ros2机器人foxy版用笔记本摄像头跑单目orb_slam3
-
odom和IMU融合时,机器人在晃动,为什么? -
@2543298600 是用的robot_localization融合的吗?我用实体机器人跑的rviz2里面机器人模型是一直在闪,你试着改一下robot_localization 配置文件:
Whether to broadcast the transformation over the /tf topic. Defaults to true if unspecified.
publish_tf: false机器人差速模型发布tf robot_localization 也发布tf 我觉得是同一个topic 2个发布者会有冲突,我把 publish_tf: false 就不闪了,不知道和你遇到的是不是同一个问题
-
此回复已被删除! -
@SciMaker 您好,我有遇到跟你相同的問題,想請問您是改寫CMakeLists的哪裡呢?
謝謝您 -
@毛哥成山轮胎机油保养 您好,我跟SciMaker有相同的問題,也有按照您說的把libORB_SLAM3.so複製到usr/lib底下,依舊有相同的問題。
-
@tianrunyang19 如果要想向前走下去,cmake 编译是一道绕不过的坎,花一个多星期百度找教程系统学一下吧,要不然后面没法玩,每个文件都需要编译。其实编译无非就是一个找头文件,找库文件的过程,
要根据提示看看缺什么文件,然后用
sudo find / -name 文件名 //在整个电脑内查找文件
如果有这个文件,头文件放在/usr/include,库文件放在/usr/lib(简单粗暴,只适合新手),如果没有这个文件要想办法得到这个文件。 -
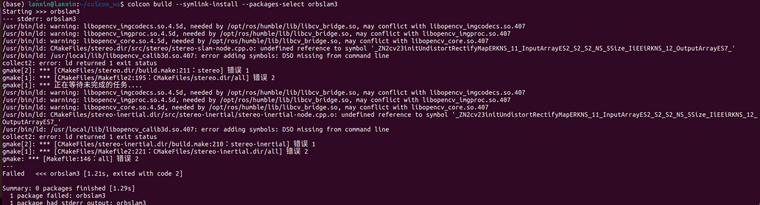 我在运行colcon build --symlink-install --packages-select orbslam3这个命令的时候遇到这个错误/usr/bin/ld: /usr/local/lib/libopencv_calib3d.so.407: error adding symbols: DSO missing from command line
我在运行colcon build --symlink-install --packages-select orbslam3这个命令的时候遇到这个错误/usr/bin/ld: /usr/local/lib/libopencv_calib3d.so.407: error adding symbols: DSO missing from command line
请问这应该怎么解决呢,前面编译orb3的时候是正常的 -
@1607698496 兄弟有解决这个问题吗
-
楼主,我的笔记本摄像头视频编码格式为yuyv,但ros2需要的格式为mono8等,所以我运行ros2 run orbslam3 mono ~/ORB_SLAM3/Vocabulary/ORBvoc.txt ~/ORB_SLAM3/Examples/Monocular/RealSense_D435i.yaml会报错,想请教一下您怎么解决
-
ros2 run orbslam3 mono ~/Documents/SLAM/ORB_SLAM3/Vocabulary/ORBvoc.txt ~/Documents/SLAM/ORB_SLAM3/Examples/Monocular/RealSense_D435i.yaml
显示画面是黑的,而且会闪退。
报错信息:ERROR: Frame with a timestamp older than previous frame detected!
Creation of new map with id: 1
Stored map with ID: 0
Creation of new map with last KF id: 0SYSTEM-> Reseting active map in monocular case
terminate called after throwing an instance of 'cv::Exception'
what(): OpenCV(4.2.0) ../modules/imgproc/src/color.simd_helpers.hpp:92: error: (-2:Unspecified error) in function 'cv::impl::{anonymous}::CvtHelper<VScn, VDcn, VDepth, sizePolicy>::CvtHelper(cv::InputArray, cv::OutputArray, int) [with VScn = cv::impl::{anonymous}::Set<1>; VDcn = cv::impl::{anonymous}::Set<3, 4>; VDepth = cv::impl::{anonymous}::Set<0, 2, 5>; cv::impl::{anonymous}::SizePolicy sizePolicy = cv::impl::<unnamed>::NONE; cv::InputArray = const cv::_InputArray&; cv::OutputArray = const cv::_OutputArray&]'Invalid number of channels in input image:
'VScn::contains(scn)'
where
'scn' is 2
是为什么啊