ros2机器人foxy版用笔记本摄像头跑单目orb_slam3
-
@1157354382 m@ubun:~$ ros2 run orbslam3 mono ~/ORB_SLAM3/Vocabulary/ORBvoc.txt ~/ORB_SLAM3/Examples/Monocular/RealSense_D435i.yaml
ORB-SLAM3 Copyright (C) 2017-2020 Carlos Campos, Richard Elvira, Juan J. Gómez, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
ORB-SLAM2 Copyright (C) 2014-2016 Raúl Mur-Artal, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
This program comes with ABSOLUTELY NO WARRANTY;
This is free software, and you are welcome to redistribute it
under certain conditions. See LICENSE.txt.Input sensor was set to: Monocular
Loading settings from /home/m/ORB_SLAM3/Examples/Monocular/RealSense_D435i.yaml
Camera1.k3 optional parameter does not exist...
-Loaded camera 1
Camera.newHeight optional parameter does not exist...
Camera.newWidth optional parameter does not exist...
-Loaded image info
-Loaded ORB settings
Viewer.imageViewScale optional parameter does not exist...
-Loaded viewer settings
System.LoadAtlasFromFile optional parameter does not exist...
System.SaveAtlasToFile optional parameter does not exist...
-Loaded Atlas settings
System.thFarPoints optional parameter does not exist...
-Loaded misc parametersSLAM settings:
-Camera 1 parameters (Pinhole): [ 382.613 382.613 320.183 236.455 ]
-Camera 1 distortion parameters: [ 0 0 0 0 ]
-Original image size: [ 640 , 480 ]
-Current image size: [ 640 , 480 ]
-Sequence FPS: 30
-Features per image: 1250
-ORB scale factor: 1.2
-ORB number of scales: 8
-Initial FAST threshold: 20
-Min FAST threshold: 7Loading ORB Vocabulary. This could take a while...
Vocabulary loaded!Initialization of Atlas from scratch
Creation of new map with id: 0
Creation of new map with last KF id: 0
Seq. Name:
There are 1 cameras in the atlas
Camera 0 is pinhole
slam changedStarting the Viewer
你的下一步该加载摄像头配置了,看看你的摄像头配置文件路径对吗? -
@毛哥成山轮胎机油保养 无论我是对的还是错的,都直接结束程序了,莫名其妙的,用ros2来驱动
-
 @WK%2.png" class=" img-fluid img-markdown" />
@WK%2.png" class=" img-fluid img-markdown" />
您好,wo'xian我想结合ros2——orbslam3和gazebo仿真,在订阅到图像后,在运行程序后,orbslam3也显示出来有图像接收到了,但是在可视化界面根本没有图像,这是什么原因,困扰很久了,真心想解决这个问题 -
@3532206791 你让仿真的小车移动一下,也许就会出来图像,我没有跑过仿真的,但是用实体的摄像头跑单目跑到你这个地方也卡了我很久,有一次无意中移动了一下摄像头图像就出来了。他计算第一帧和第二帧图像,如果摄像头没动,第一帧和第二帧图像是同一个图像,初始化不了,不知道你碰到的问题和我曾经碰到的问题是否一样。
-
@毛哥成山轮胎机油保养 哎,我尝试了,不管怎么动小车都没有图像显示,不知道是不是代码方面还有什么其他的问题,还是说只进行话题的订阅还不够,还需要调整其他参数?不明白
-
@毛哥成山轮胎机油保养 还是说需要用这个文件 RealSense_D435i.yaml
-
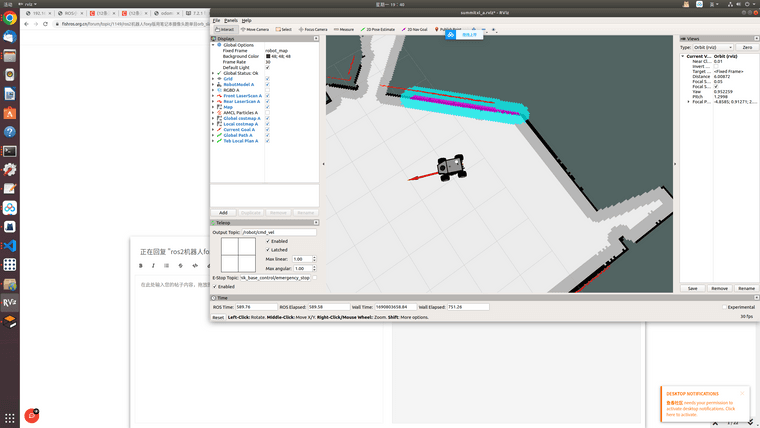
你好,我解决了无法显示图像的问题,但是新的问题又出现了,我在仿真环境下运行orbslam3很容易终止,不知道您用摄像头卡不卡,会不会很容易中断
-
@3532206791 用笔记本的摄像头和外接的奥比中光摄像头我都试过,挺流畅的,只不过开源程序都是不成熟的程序,会有其他方面的问题,距离应用还有十万八千里。
-
odom和IMU融合时,机器人在晃动,为什么? -
@2543298600 是用的robot_localization融合的吗?我用实体机器人跑的rviz2里面机器人模型是一直在闪,你试着改一下robot_localization 配置文件:
Whether to broadcast the transformation over the /tf topic. Defaults to true if unspecified.
publish_tf: false机器人差速模型发布tf robot_localization 也发布tf 我觉得是同一个topic 2个发布者会有冲突,我把 publish_tf: false 就不闪了,不知道和你遇到的是不是同一个问题
-
此回复已被删除! -
@SciMaker 您好,我有遇到跟你相同的問題,想請問您是改寫CMakeLists的哪裡呢?
謝謝您 -
@毛哥成山轮胎机油保养 您好,我跟SciMaker有相同的問題,也有按照您說的把libORB_SLAM3.so複製到usr/lib底下,依舊有相同的問題。
-
@tianrunyang19 如果要想向前走下去,cmake 编译是一道绕不过的坎,花一个多星期百度找教程系统学一下吧,要不然后面没法玩,每个文件都需要编译。其实编译无非就是一个找头文件,找库文件的过程,
要根据提示看看缺什么文件,然后用
sudo find / -name 文件名 //在整个电脑内查找文件
如果有这个文件,头文件放在/usr/include,库文件放在/usr/lib(简单粗暴,只适合新手),如果没有这个文件要想办法得到这个文件。 -
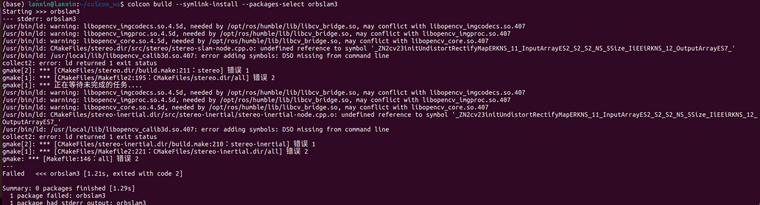 我在运行colcon build --symlink-install --packages-select orbslam3这个命令的时候遇到这个错误/usr/bin/ld: /usr/local/lib/libopencv_calib3d.so.407: error adding symbols: DSO missing from command line
我在运行colcon build --symlink-install --packages-select orbslam3这个命令的时候遇到这个错误/usr/bin/ld: /usr/local/lib/libopencv_calib3d.so.407: error adding symbols: DSO missing from command line
请问这应该怎么解决呢,前面编译orb3的时候是正常的 -
@1607698496 兄弟有解决这个问题吗
-
楼主,我的笔记本摄像头视频编码格式为yuyv,但ros2需要的格式为mono8等,所以我运行ros2 run orbslam3 mono ~/ORB_SLAM3/Vocabulary/ORBvoc.txt ~/ORB_SLAM3/Examples/Monocular/RealSense_D435i.yaml会报错,想请教一下您怎么解决
-
ros2 run orbslam3 mono ~/Documents/SLAM/ORB_SLAM3/Vocabulary/ORBvoc.txt ~/Documents/SLAM/ORB_SLAM3/Examples/Monocular/RealSense_D435i.yaml
显示画面是黑的,而且会闪退。
报错信息:ERROR: Frame with a timestamp older than previous frame detected!
Creation of new map with id: 1
Stored map with ID: 0
Creation of new map with last KF id: 0SYSTEM-> Reseting active map in monocular case
terminate called after throwing an instance of 'cv::Exception'
what(): OpenCV(4.2.0) ../modules/imgproc/src/color.simd_helpers.hpp:92: error: (-2:Unspecified error) in function 'cv::impl::{anonymous}::CvtHelper<VScn, VDcn, VDepth, sizePolicy>::CvtHelper(cv::InputArray, cv::OutputArray, int) [with VScn = cv::impl::{anonymous}::Set<1>; VDcn = cv::impl::{anonymous}::Set<3, 4>; VDepth = cv::impl::{anonymous}::Set<0, 2, 5>; cv::impl::{anonymous}::SizePolicy sizePolicy = cv::impl::<unnamed>::NONE; cv::InputArray = const cv::_InputArray&; cv::OutputArray = const cv::_OutputArray&]'Invalid number of channels in input image:
'VScn::contains(scn)'
where
'scn' is 2
是为什么啊