fishros工具安装humble后编译d2lros2-humble-code/fishbot_ws报错
-
@小鱼 请帮忙看看,谢谢
-
望 望天 将这个主题转为问答主题,在
-
@望天 有用rosdepc安装依赖吗,重装ros2是没有的,一键安装和手动安装的都是同一个没区别。
-
@小鱼 我刚才的错误,是我没有安装导航包的问题
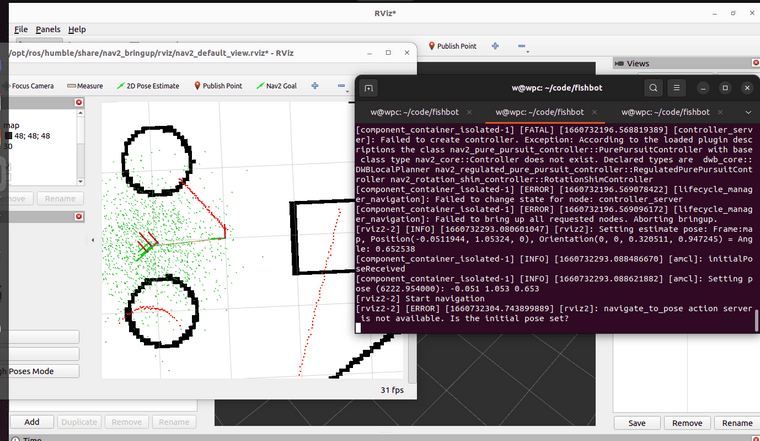
sudo apt install ros-humble-nav2-*不过安装后,如果保留功能包《nav2_pure_pursuit_controller》依然报错:
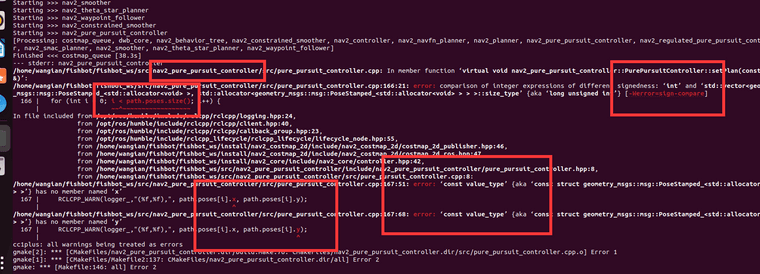
去掉功能包《nav2_pure_pursuit_controller》后使用colcon build,结果如下:
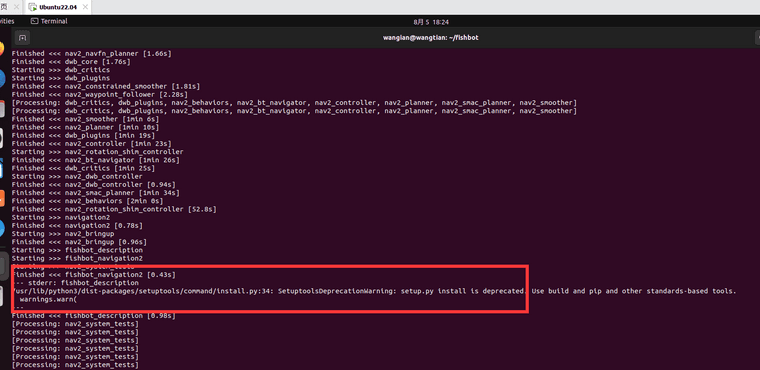
如果将《nav2_pure_pursuit_controller》和《navigation2》都删除,编译就通过,能正常进行建图。
由此可以说明是导航部分代码还存在问题吗?还是我哪里配置不对?
-
@望天 这个问题我也出现了!!!
-
@小鱼 《nav2_pure_pursuit_controller》 这个功能包错误 怎么解决呀?
-
@宏沉一笑 直接删掉
-
@小鱼
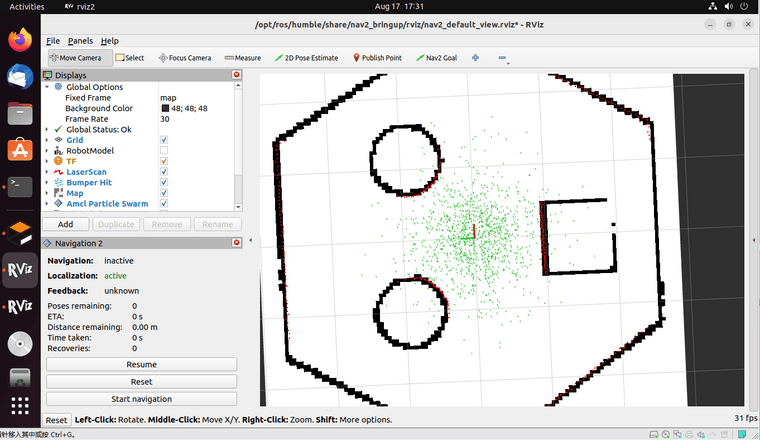
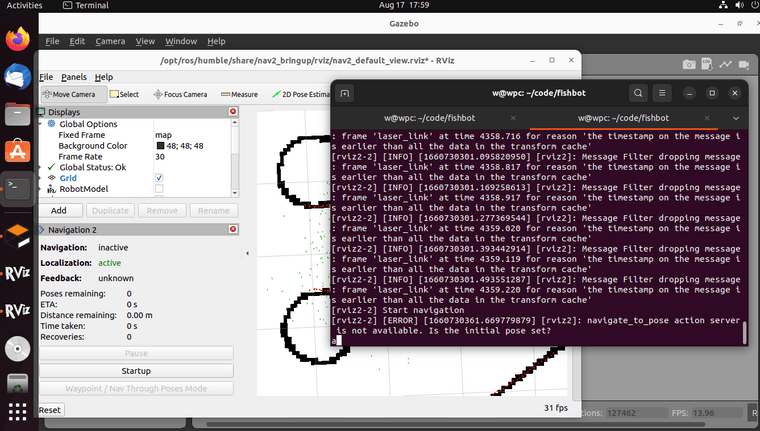
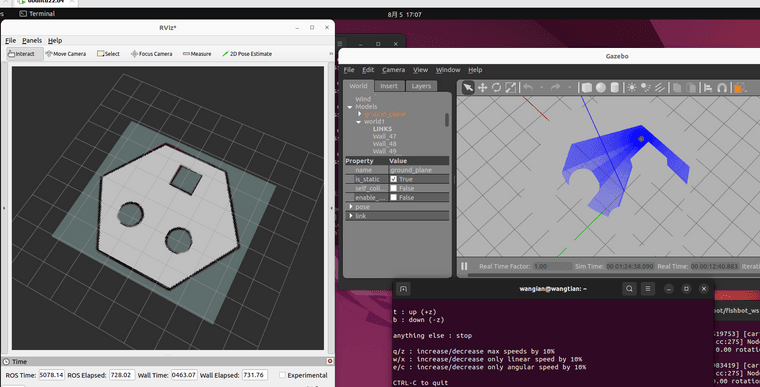
运行了这个命令 ros2 launch fishbot_navigation2 navigation2.launch.py 后,没有成功 它出现了下面的错误
[rviz2-2] [ERROR] [1660639092.717540128] [rviz2]: navigate_to_pose action server is not available. Is the initial pose set?这个要怎么解决了?
-
运行了之后,navigation没有激活
-
-
-
-
-
@望天 这个不借,可以试试