小鱼的一键安装系列
-
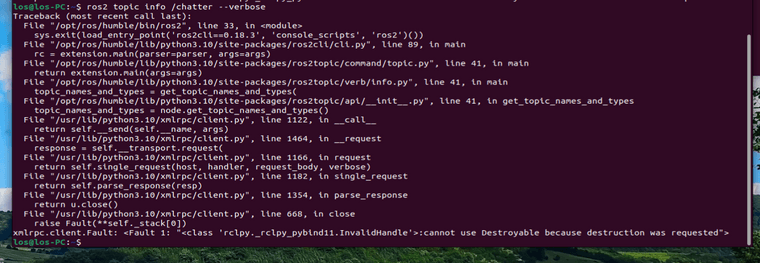 在命令行中配置DDS,输入“ros2 topic info /chatter --verbose”代码为什么会报这样的错误?
在命令行中配置DDS,输入“ros2 topic info /chatter --verbose”代码为什么会报这样的错误? -
Ubuntu16.04 多次换源失败....还有办法吗?
*apt更新失败,后续程序可能会继续尝试...,['\n', 'WARNING: apt does not have a stable CLI interface. Use with caution in scripts.\n', '\n', "E: The repository 'https://packages.ros.org/ros/ubuntu xenial Release' does not have a Release file.\n", "E: The repository 'https://packages.ros.org/ros2/ubuntu xenial Release' does not have a Release file.\n"]
四次换源后都失败了,请及时联系小鱼获取解决方案并处理!
Run CMD Task:[sudo apt-cache search ros-base ]
[-]Result:success e development metapackageKerberosRun CMD Task:[ls /opt/ros/False/setup.bash]
[-]Result:code:2安装失败了,请打开鱼香社区:https://fishros.org.cn/forum 在一键安装专区反馈问题...
Run CMD Task:[ls /opt/ros/False/setup.bash]
[-]Result:code:2* -
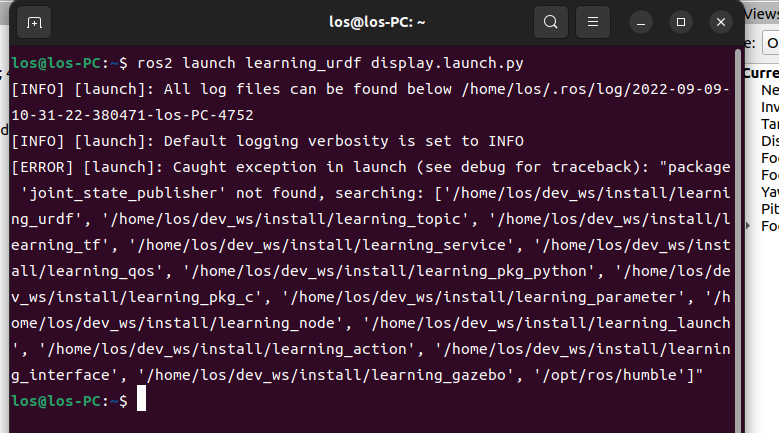 你好,请问启动机器人这样报错该怎么做啊?
你好,请问启动机器人这样报错该怎么做啊? -
@LOS 前面rosdepc指令用错了应该是,你可以手动安装一下缺少的包
-
安装完成后小乌龟不能动,rviz启动不了
-
为什么roscore缺失 如何解决呢 -
小鱼,为什么安装好微信(桌面版),点击没反应呢?
-
@阔野 桌面版有bug,建议换dcker版本
-
@小鱼 安装好docker版的后,运行微信它说微信版本太低需要升级,然后点确定 微信界面就一直“正在登陆...." 这种情况怎么解决呢?
-
roscore启动不了该怎么解决 -
Run CMD Task:[sudo apt-cache search aptitude ]
[-]Result:successTraceback (most recent call last):
File "/tmp/fishinstall/install.py", line 88, in <module>
main()
File "/tmp/fishinstall/install.py", line 81, in main
run_tool_file(tools[code]['tool'].replace(url_prefix,'').replace("/","."))
File "/tmp/fishinstall/tools/base.py", line 1222, in run_tool_file
if tool.run()==False: return False
File "/tmp/fishinstall/tools/tool_install_ros.py", line 385, in run
self.install_ros()
File "/tmp/fishinstall/tools/tool_install_ros.py", line 378, in install_ros
ros_version = self.choose_and_install_ros()
File "/tmp/fishinstall/tools/tool_install_ros.py", line 319, in choose_and_install_ros
AptUtils.install_pkg('aptitude')
File "/tmp/fishinstall/tools/base.py", line 1161, in install_pkg
for key in dic.keys():
AttributeError: 'NoneType' object has no attribute 'keys' -
您好,为什么ros1啊,只有ros2,我是20.04的乌班图
RUN Choose Task:[请输入括号内的数字]
请选择你要安装的ROS版本名称(请注意ROS1和ROS2区别):
[1]:humble(ROS2)
[2]:rolling(ROS2)
[0]:quit
请输入[]内的数字以选择:3
请输入[]内的数字以选择: -
此回复已被删除! -
@半壁 请单独发一个新帖子并附上日志信息
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
1.使用明确的问题标题
好的标题:一键安装后 进不去图形操作系统(能让人一眼看出问题)
不好的标题(看到后感觉莫名其妙不想回答):
ssh远程登录(远程登录怎么了?)
ROS安装错误(不说什么错误)- 不要截图,要复制粘贴,一定要代码块包裹
不要截图的原因是,代码方便回答者去复制帮你搜索,而且无论是在手机上还是电脑上都更容易看。
用代码块包裹是为了更加美观,不会一个代码很长一段,不易阅读 - 尽量提供更多的信息(大多数问题不是别人不知道如何解决,而是不知道你的问题是什么)
即使再厉害的大佬,也不能通过你的一句话帮你定位出问题,提出解决方案。
如果是程序,版本信息,系统信息,ROS版本,你的前后操作等等都是帮助快速定位的。
4.如何添加话题
编辑话题在编辑页面左下方
- 不要截图,要复制粘贴,一定要代码块包裹
-
@云天明 你搞错了,你的系统时ubuntu22.04
-
@小鱼 不好意思,是我看错了,谢谢
-

你好,系统是ubuntu18.04,在一键安装ros,检测出依赖有问题后,先按n后按y后,出现此问题,我应该如何解决?
-
@半壁 可以多试几次,比如
y
n ,y
n,n,y
n,n,n,y -
树莓派安装ROS,一直提示换源失败
RUN Choose Task:[请输入括号内的数字]
---众多工具,等君来用---
[1]:一键安装:ROS(支持ROS和ROS2,树莓派Jetson)
[11]:一键安装:ROS+Docker(支持所有版本ROS/ROS2)
[2]:一键安装:github桌面版(小鱼常用的github客户端)
[3]:一键配置:rosdep(小鱼的rosdepc,又快又好用)
[4]:一键配置:ROS环境(快速更新ROS环境设置,自动生成环境选择)
[5]:一键配置:系统源(更换系统源,支持全版本Ubuntu系统)
[6]:一键安装:nodejs
[7]:一键安装:VsCode开发工具
[8]:一键安装:Docker
[9]:一键安装:Cartographer(内测版v0.1)
[10]:一键安装:微信(可以在Linux上使用的微信)
[77]:测试模式:运行自定义工具测试
[0]:quit
请输入[]内的数字以选择:1
--2022-09-26 17:57:56-- http://fishros.com/install/install1s/tools/tool_install_ros.py
Resolving fishros.com (fishros.com)... 139.9.131.171
Connecting to fishros.com (fishros.com)|139.9.131.171|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 19050 (19K) [application/octet-stream]
Saving to: ‘/tmp/fishinstall/tools/tool_install_ros.py’/tmp/fishinstall/to 100%[===================>] 18.60K --.-KB/s in 0.08s
2022-09-26 17:57:56 (225 KB/s) - ‘/tmp/fishinstall/tools/tool_install_ros.py’ saved [19050/19050]
--2022-09-26 17:57:56-- http://fishros.com/install/install1s/tools/tool_config_rosenv.py
Resolving fishros.com (fishros.com)... 139.9.131.171
Connecting to fishros.com (fishros.com)|139.9.131.171|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 2457 (2.4K) [application/octet-stream]
Saving to: ‘/tmp/fishinstall/tools/tool_config_rosenv.py’/tmp/fishinstall/to 100%[===================>] 2.40K --.-KB/s in 0.003s
2022-09-26 17:57:56 (893 KB/s) - ‘/tmp/fishinstall/tools/tool_config_rosenv.py’ saved [2457/2457]
--2022-09-26 17:57:56-- http://fishros.com/install/install1s/tools/tool_config_system_source.py
Resolving fishros.com (fishros.com)... 139.9.131.171
Connecting to fishros.com (fishros.com)|139.9.131.171|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 7511 (7.3K) [application/octet-stream]
Saving to: ‘/tmp/fishinstall/tools/tool_config_system_source.py’/tmp/fishinstall/to 100%[===================>] 7.33K --.-KB/s in 0.003s
2022-09-26 17:57:56 (2.84 MB/s) - ‘/tmp/fishinstall/tools/tool_config_system_source.py’ saved [7511/7511]
欢迎使用一键安装ROS和ROS2,支持树莓派Jetson,本工具由作者小鱼提供
欢迎使用ROS开箱子工具,本工具由[鱼香ROS]小鱼贡献..
小鱼:检测当前系统debian10.11:buster 支持一键安装ROS
=========接下来这一步很重要,如果不知道怎么选请选择1========
RUN Choose Task:[请输入括号内的数字]
首次安装一定要换源并清理三方源,换源!!!系统默认国外源容易失败!!
[1]:更换系统源再继续安装
[2]:不更换继续安装
[0]:quit
请输入[]内的数字以选择:1
欢迎使用一键换源工具,本工具由[鱼香ROS]小鱼贡献..
RUN Choose Task:[请输入括号内的数字]
请选择换源方式,如果不知道选什么请选2
[1]:仅更换系统源
[2]:更换系统源并清理第三方源
[0]:quit
请输入[]内的数字以选择:2
Run CMD Task:[sudo rm -rf /etc/apt/sources.list]
[-]Result:success删除一个资源文件
Run CMD Task:[sudo rm -rf /etc/apt/sources.list.d]
[-]Result:successRun CMD Task:[sudo mkdir -p /etc/apt/sources.list.d]
[-]Result:successRun CMD Task:[dpkg --print-architecture]
[-]Result:success检测到当前系统架构为[armhf:buster],正在为你更换对应源..
替换完成,尝试第一次更新....
Run CMD Task:[sudo apt update]
[|]Get:2 https://mirrors.tuna.tsinghua.edu.cn/debian buster-updates InRelease [5[-]Get:3 https://mirrors.tuna.tsinghua.edu.cn/debian buster-backports InRelease [/]Get:4 https://mirrors.tuna.tsinghua.edu.cn/debian-security buster/updates InR[-]Result:success st --upgradable' to see them.搞定了,不信你看,累死宝宝了,还不快去给小鱼点个赞~
['Get:1 https://mirrors.tuna.tsinghua.edu.cn/debian buster InRelease [122 kB]', 'Get:2 https://mirrors.tuna.tsinghua.edu.cn/debian buster-updates InRelease [56.6 kB]', 'Get:3 https://mirrors.tuna.tsinghua.edu.cn/debian buster-backports InRelease [51.4 kB]', 'Get:4 https://mirrors.tuna.tsinghua.edu.cn/debian-security buster/updates InRelease [34.8 kB]', 'Fetched 264 kB in 2s (122 kB/s)', 'Reading package lists...', 'Building dependency tree...', 'Reading state information...', "418 packages can be upgraded. Run 'apt list --upgradable' to see them."]
镜像修复完成.....
Run CMD Task:[sudo apt update]
[|]Get:2 https://mirrors.tuna.tsinghua.edu.cn/debian buster-updates InRelease [5[-]Get:3 https://mirrors.tuna.tsinghua.edu.cn/debian buster-backports InRelease [/]Get:4 https://mirrors.tuna.tsinghua.edu.cn/debian-security buster/updates InR[-]Result:success st --upgradable' to see them.Run CMD Task:[sudo apt-cache search curl ]
[-]cl-curry-compose-reader-macros - Reader macros for function partial applicati[-]libcupt4-2-downloadmethod-curl - flexible package manager -- libcurl download[]libcurl3-gnutls - easy-to-use client-side URL transfer library (GnuTLS flavou[]libcurl4-gnutls-dev - development files and documentation for libcurl (GnuTLS[|]libcurl4-nss-dev - development files and documentation for libcurl (NSS flavo[-]libcurl4-openssl-dev - development files and documentation for libcurl (OpenS[/]flickcurl-doc - utilities to call the Flickr API from command line - document[/]libflickcurl0-dbg - C library for accessing the Flickr API - debugging symbol[]forensics-extra - Forensics Environment - extra console components (metapacka[|]gnupg1 - GNU privacy guard - a PGP implementation (deprecated "classic" versi[-]golang-github-moul-http2curl-dev - Go package for convert Golang's http.Reque[|]libghc-curl-doc - Documentation for the libcurl Haskell bindings; documentati[-]libghc-curl-prof - Profiling libraries for the libcurl Haskell bindings; prof[]libghc-hxt-doc - collection of tools for processing XML with Haskell; documen[|]libghc-hxt-prof - collection of tools for processing XML with Haskell; profil[-]libghc-hxt-http-doc - Interface to native Haskell HTTP package HTTP; document[/]libghc-hxt-http-prof - Interface to native Haskell HTTP package HTTP; profili[]libresource-retriever-dev - Robot OS resource_retriever library - development[]librust-curl+http2-dev - Rust bindings to libcurl for making HTTP requests - [|]librust-curl-dev - Rust bindings to libcurl for making HTTP requests - Rust s[-]librust-curl-sys+http2-dev - Native bindings to the libcurl library - feature[/]librust-curl-sys+libnghttp2-sys-dev - Native bindings to the libcurl library []librust-curl-sys-dev - Native bindings to the libcurl library - Rust source c[|]librust-git2+curl-dev - Bindings to libgit2 for interoperating with git repos[-]librust-git2-curl-dev - Backend for an HTTP transport in libgit2 powered by l[/]librust-libgit2-sys+curl-dev - Native bindings to the libgit2 library - featu[]librust-libgit2-sys+curl-sys-dev - Native bindings to the libgit2 library - f[/]libstrongswan-extra-plugins - strongSwan utility and crypto library (extra pl[/]golang-github-ssgelm-cookiejarparser-dev - Go library that parses a curl cook[-]Result:success ect inputstream addon for KodiRun CMD Task:[sudo apt install curl -y]
[-]Result:success e and 418 not upgraded.Run CMD Task:[sudo apt-cache search gnupg2 ]
[|]gnupg2 - GNU privacy guard - a free PGP replacement (dummy transitional packa[-]Result:successRun CMD Task:[sudo apt install gnupg2 -y]
[-]Result:success e and 418 not upgraded.Run CMD Task:[curl -s https://gitee.com/ohhuo/rosdistro/raw/master/ros.asc | sudo apt-key add -]
[-]Result:successRun CMD Task:[dpkg --print-architecture]
[-]Result:success根据您的系统,为您推荐安装源为['http://packages.ros.org/ros/ubuntu/', 'http://packages.ros.org/ros2/ubuntu/']
Run CMD Task:[sudo apt update]
[-]Get:3 https://mirrors.tuna.tsinghua.edu.cn/debian buster-updates InRelease [5[/]Get:4 https://mirrors.tuna.tsinghua.edu.cn/debian buster-backports InRelease [|]Get:6 https://mirrors.tuna.tsinghua.edu.cn/debian-security buster/updates InR[/]Get:8 http://packages.ros.org/ros2/ubuntu buster/main armhf Packages [59.0 kB[-]Result:success st --upgradable' to see them.Run CMD Task:[sudo apt-cache search ros-base ]
[-]Result:success r Robot OS roscpp-coreageKerberos换源后更新失败,第二次开始切换源,尝试更换ROS2源为华为源!
根据您的系统,为您推荐安装源为['http://packages.ros.org/ros/ubuntu/', 'http://packages.ros.org/ros2/ubuntu/']
Run CMD Task:[sudo rm -rf /etc/apt/sources.list.d/ros-fish.list]
[-]Result:successRun CMD Task:[sudo apt update]
[/]Get:4 https://mirrors.tuna.tsinghua.edu.cn/debian buster-updates InRelease [5[]Get:5 https://mirrors.tuna.tsinghua.edu.cn/debian buster-backports InRelease [|]Get:6 https://mirrors.tuna.tsinghua.edu.cn/debian-security buster/updates InR[-]Result:success st --upgradable' to see them.Run CMD Task:[sudo apt-cache search ros-base ]
[-]Result:success r Robot OS roscpp-coreageKerberos换源后更新失败,第三次开始切换源,尝试更换ROS2源为ROS2官方源!
根据您的系统,为您推荐安装源为['http://packages.ros.org/ros/ubuntu/', 'http://packages.ros.org/ros2/ubuntu/']
Run CMD Task:[sudo rm -rf /etc/apt/sources.list.d/ros-fish.list]
[-]Result:successRun CMD Task:[sudo apt update]
[-]Get:3 https://mirrors.tuna.tsinghua.edu.cn/debian buster-updates InRelease [5[/]Get:4 https://mirrors.tuna.tsinghua.edu.cn/debian buster-backports InRelease []Get:5 https://mirrors.tuna.tsinghua.edu.cn/debian-security buster/updates InR[-]Result:success st --upgradable' to see them.Run CMD Task:[sudo apt-cache search ros-base ]
[-]Result:success r Robot OS roscpp-coreageKerberos换源后更新失败,第四次开始切换源,尝试使用https-ROS2官方源~!
根据您的系统,为您推荐安装源为['http://packages.ros.org/ros/ubuntu/', 'http://packages.ros.org/ros2/ubuntu/']
Run CMD Task:[sudo rm -rf /etc/apt/sources.list.d/ros-fish.list]
[-]Result:successRun CMD Task:[sudo apt update]
[-]Get:3 https://mirrors.tuna.tsinghua.edu.cn/debian buster-updates InRelease [5[/]Get:4 https://mirrors.tuna.tsinghua.edu.cn/debian buster-backports InRelease [|]Get:6 https://mirrors.tuna.tsinghua.edu.cn/debian-security buster/updates InR[-]Result:success st --upgradable' to see them.Run CMD Task:[sudo apt-cache search ros-base ]
[-]Result:success r Robot OS roscpp-coreageKerberosRun CMD Task:[sudo apt update]
[/]Get:4 https://mirrors.tuna.tsinghua.edu.cn/debian buster-updates InRelease [5[]Get:5 https://mirrors.tuna.tsinghua.edu.cn/debian buster-backports InRelease [|]Get:6 https://mirrors.tuna.tsinghua.edu.cn/debian-security buster/updates InR[-]Result:success st --upgradable' to see them.Run CMD Task:[sudo apt-cache search ros-base ]
[-]Result:success r Robot OS roscpp-coreageKerberosRun CMD Task:[ls /opt/ros/False/setup.bash]
[-]Result:code:2安装失败了,请打开鱼香社区:https://fishros.org.cn/forum 在一键安装专区反馈问题...
Run CMD Task:[ls /opt/ros/False/setup.bash]
[-]Result:code:2欢迎加入机器人学习交流QQ群:139707339(入群口令:一键安装)
如在使用过程中遇到问题,请打开:https://fishros.org.cn/forum 进行反馈 -
roscore
Traceback (most recent call last):
File "/usr/bin/roscore", line 72, in <module>
import roslaunch
File "/usr/lib/python3/dist-packages/roslaunch/init.py", line 62, in <module>
from .scriptapi import ROSLaunch
File "/usr/lib/python3/dist-packages/roslaunch/scriptapi.py", line 42, in <module>
import roslaunch.parent
File "/usr/lib/python3/dist-packages/roslaunch/parent.py", line 54, in <module>
import roslaunch.server
File "/usr/lib/python3/dist-packages/roslaunch/server.py", line 79, in <module>
from rosgraph_msgs.msg import Log
ImportError: cannot import name 'Log' from 'rosgraph_msgs.msg' (/opt/ros/foxy/lib/python3.8/site-packages/rosgraph_msgs/msg/init.py)
求教,怎么解决。一开始下载的是ros2,后来下载的ros1,但是报错还是一样的,是不是要卸载ros2还是要怎么解决,新手求教,哭了