humble小车建图代码跑通了,导航文件是在foxy里面跑通的文件复制过来的,在humble里面工作不正常
-
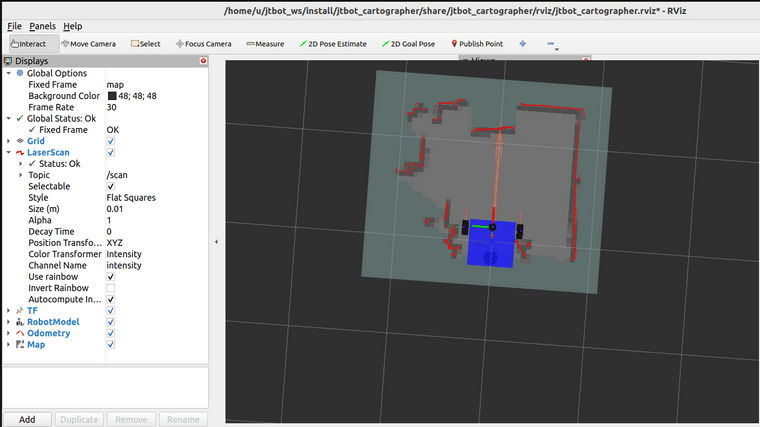
在foxy里面的slm建图文件经过简单的修改在humble里面正常运行了。
********vscode的小秘密分享给大家
因为要复制很多文件,在我使用vscode当中发现了一个非常好用的功能,以前2个电脑复制文件需要用远程 scp 命令,要一点不差的把在2个电脑的文件路径写清楚,错一点复制都成功不了,现在用一个vscode远程连接另一台电脑打开目录,一个vscode在本机打开文件目录,2台电脑需要复制什么文件直接复制粘贴就能搞定,就像在同一台电脑复制粘贴文件那么简单,真的发现vscode太强大了。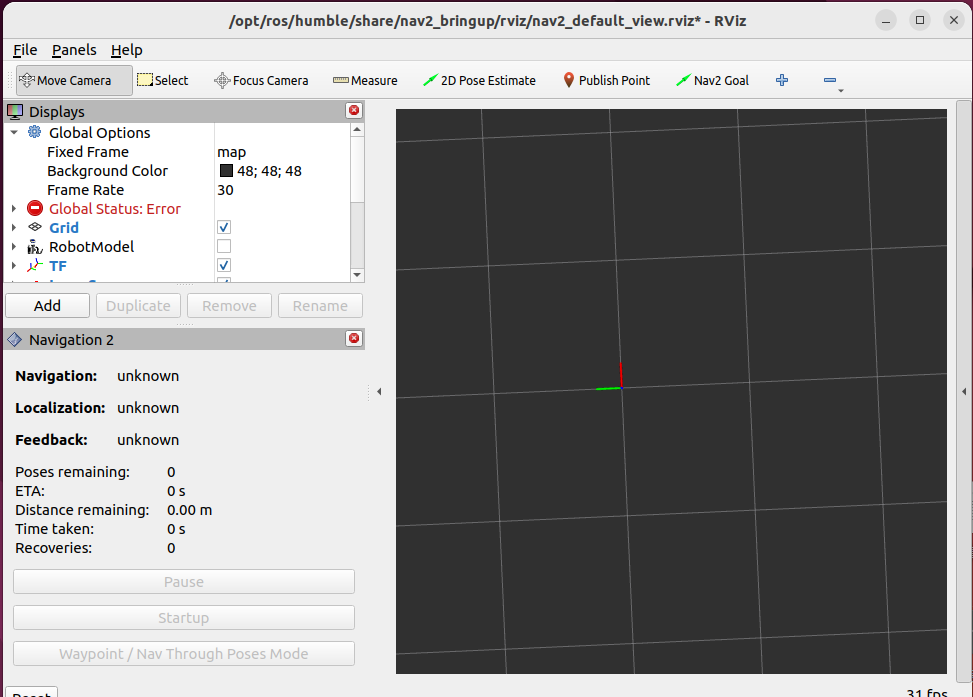
导航rviz2 加载出来这个样子,初始化的大绿箭头固定不住,不能初始化出生地点,复制的foxy里面跑通的代码,但是在humble工作不正常。
我的实物机器人是不是所有的use_sim_time都要设成False 呢? -
@毛哥成山轮胎机油保养 在 humble小车建图代码跑通了,导航文件是在foxy里面跑通的文件复制过来的,在humble里面工作不正常 中说:
是不是所有的use_sim_time都要设成False
这个是的,另外humble版本的参数和foxy版本不一样,你可以参考下fishbot仓库的
https://github.com/fishros/fishbot -
@小鱼 fixed frame 里面没有map 说明map odom base_link 的tf关系没有发布出来,如果fixed frame 换成base_link 模型 雷达 tf都能正常加载出来,不是导航代码的问题,是动态tf从哪里发布的问题
-
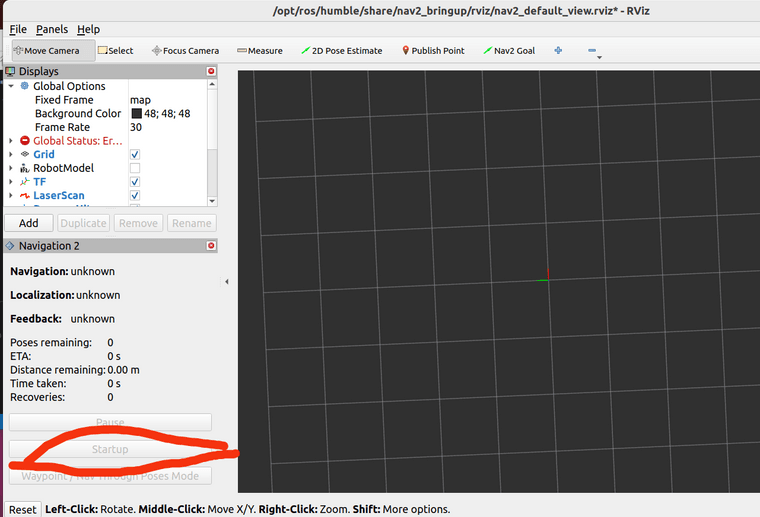
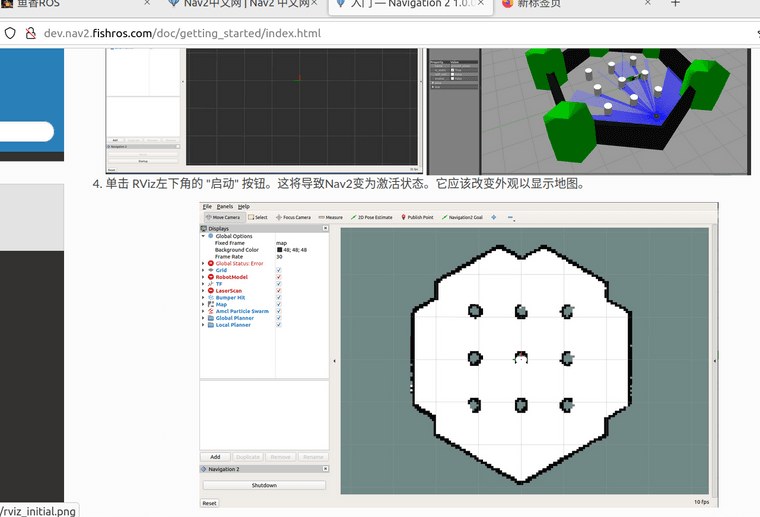
加载的这个导航的图片startup是灰的,和官网的不一样
-
@毛哥成山轮胎机油保养 我复制文件是直接在一台电脑上设置共享文件夹,用起来也还可以
-
@Lorry vscode 操作远程主机就像操做面前的电脑一样,丝毫感觉不出来其实主机在几千里之外。
-
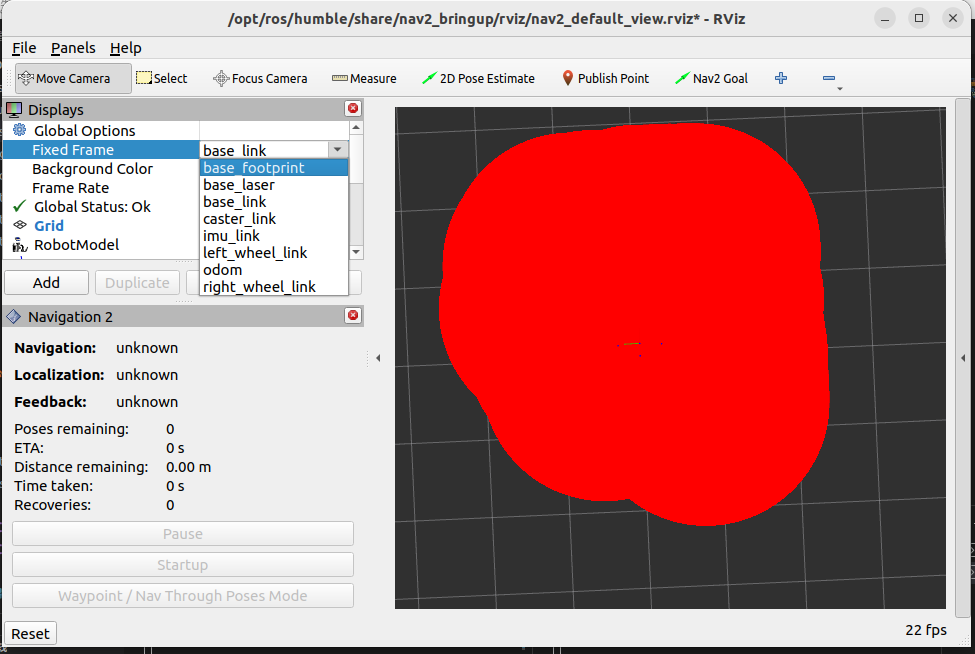
我把雷达urdf原来 laser 全部修改为 base_laser, 雷达一片红色,里面没有map -
@毛哥成山轮胎机油保养 这个红红的是啥东西,那么大
-
大佬你好,请问一下你有没有遇到过在建图的时候有没有遇到过TF延迟的问题,最近也在移植foxy的导航