求助,使用官方代码和套件导航部分出错
-
此回复已被删除! -
@小鱼 雷达和里程计测试通过,所有线都没有松动,现在数据是这样的
用键盘控制小车,第一张图中数据发生改变

但是小车自动导航的还是不行
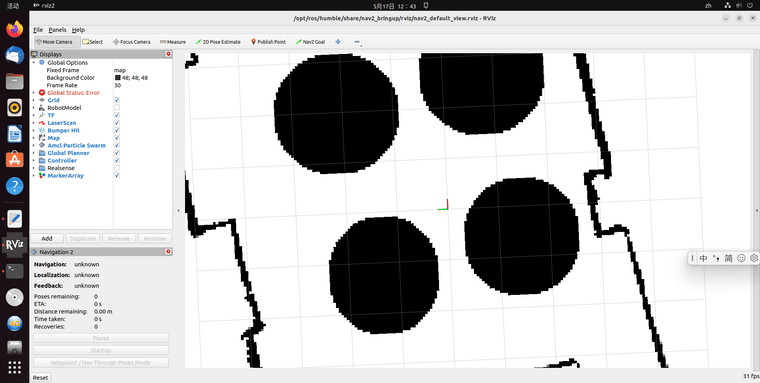
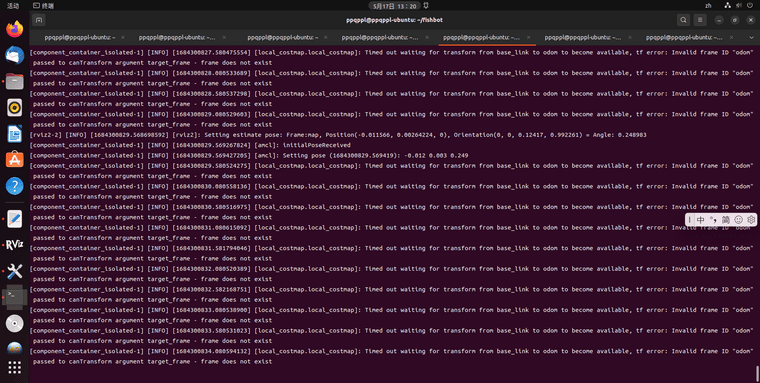
这里我点了 2D Pose Estimate 还是没有反应 -
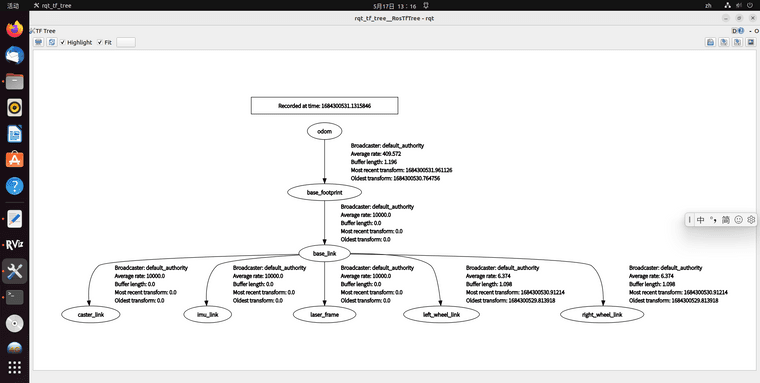
@1683127550 rqt tf tree 看下
-
@小鱼
我重新下载了一下源码编译了一下,现在和刚才错误显示不一样了
这个是 rqt-tf-tree
我这边给出小车的初始坐标和方向之后,显示这些,好像是有我点击的点的信息,但是小车那边还是没反应
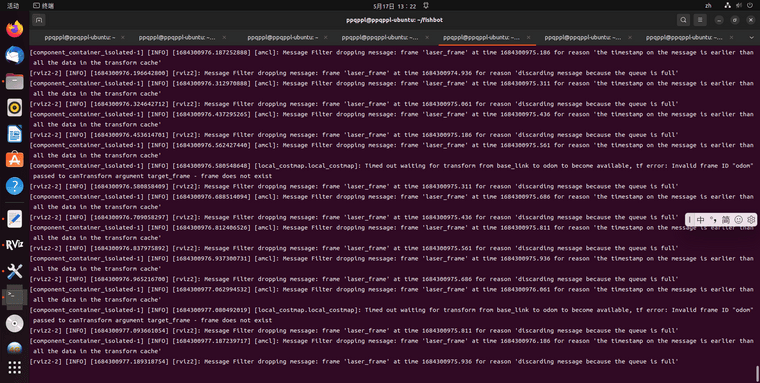
在这个基础上我重启了一下雷达,然后显示这样:
-
@小鱼 我搞定了,多谢,我看了一下 rqt-tf-tree,改了一点东西就好了
-
@1683127550 能具体说下是什么问题吗?我了解下,折腾了好久了
-
@小鱼 应该就是ros2和miscroRos通信出问题了,我这边重新编译了好多次通信节点和导航节点,才解决,之前我测试的时候,用小车不行,但是你给的那个仿真的可以
-
@小鱼 我这还有一些问题就是我在导航的时候,如果场景中出现了新的障碍物,雷达检测到,然后标红,但是障碍物移开之后,雷达再次检测在地图中并没有消失,是什么原因?
-
@1683127550 这个应该是局部代价地图没更新的原因,看看拿掉后机器人有正确扫到没有
-
@小鱼 障碍物拿掉机器人扫描的地图还是显示有这个物品
-
@小鱼 这个地图存在新出现的障碍物的问题还是没有解决
-
@1683127550 你好!请教一下大佬,我也碰到了这个问题,把fishros下面的功能包都重新编译了还是不行,是还需要修改什么地方吗?谢谢!
-
@415808688 发个新帖看看