Fishbot雷达驱动失败
-
使用fishbot雷达驱动时报错
欢迎鱼香ROS使用雷达驱动系统,注意当前版本为ROS2版本驱动哦~ 1) 驱动雷达 2) 建图测试 3) 退出 #? 1 UART2SOCKET:8888->/tmp/fishbot_laser Prepare to Accept connect! 3 <socket.socket fd=6, family=AddressFamily.AF_INET, type=SocketKind.SOCK_STREAM, proto=0, laddr=('172.17.0.3', 8888), raddr=('192.168.0.104', 53589)> 4 PTY: Opened /dev/pts/4 for 0.0.0.0:8888 [YDLIDAR INFO] Current ROS Driver Version: 1.4.5 [YDLIDAR]:SDK Version: 1.4.5 [YDLIDAR]:Lidar running correctly ! The health status: good timout count: 1 timout count: 2 139971629295168 thread has been canceled [CYdLidar] Failed to turn on the Lidar, because the lidar is blocked or the lidar hardware is faulty. [YDLIDAR INFO] Now YDLIDAR is stopping .......ros2版本为humble,跳接线已经连到wifi,可以ping通,雷达已连接,可以转,但是报了以上错误
-
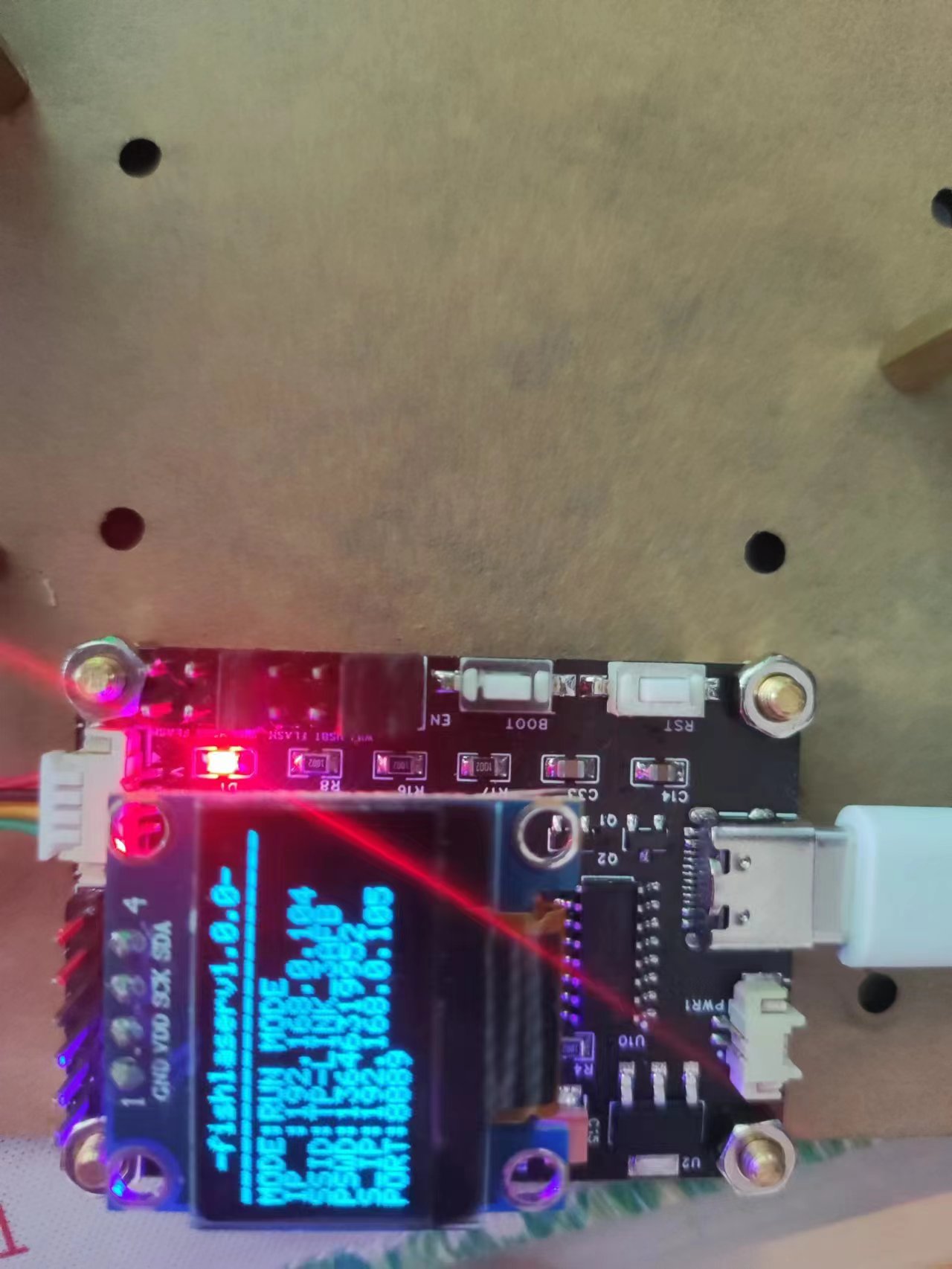
@3253519642 模式是否切换,网络环境如何
-
@小鱼
工作模式已经变为WiFi模式,网络良好,雷达也已经连接转动,下面的图片没拍到
-
@3253519642 重启下docker端和硬件端看看,不行我远程看看
-
@小鱼 重启了还是不行

-
-
@3253519642 你当时怎么解决的问题啊,我和你一样的问题
-
@2693226252 我也遇到了这个问题,没有解决
-
@小鱼 请问这个的解决方法可以贴一下吗
-
@小鱼 我的也Ubuntu 22.04和ROS2(humble)
ping 192.168.137.47 PING 192.168.137.47 (192.168.137.47) 56(84) bytes of data.发现和雷达的IP应该是没连上
-
@mixllred 请提供详细的相关信息(看你ip网段应该是手机或电脑热点,非常不推荐!):https://fishros.org.cn/forum/topic/151/提问前必看-不符合要求的问题拒绝回答
-
@mixllred 在 Fishbot雷达驱动失败 中说:
@小鱼 我的也Ubuntu 22.04和ROS2(humble)
ping 192.168.137.47 PING 192.168.137.47 (192.168.137.47) 56(84) bytes of data.发现和雷达的IP应该是没连上
换个固件版本试试,我换到最新的后解决了