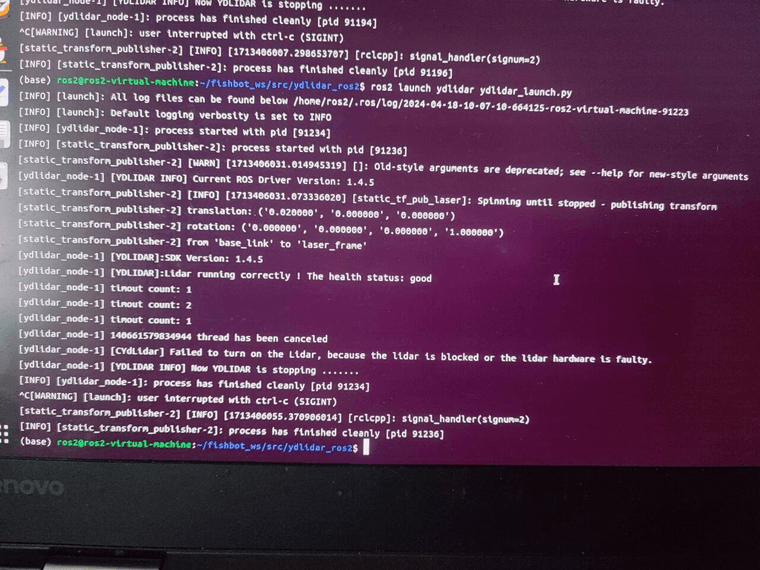
使用fishbot有线驱动时,雷达驱动失败,试过改成wifi模式,拔掉en跳线帽,重启都没有解决
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
2186506480 发布的最新帖子
-
RVIZ2可视化URDF模型报错发布在 无人机
RVIZ2中不显示机器人模型,输入运行命令ros2 launch fishbot_description display_rviz2.launch.py后显示
[INFO] [launch]: All log files can be found below /home/ros2/.ros/log/2023-12-04-21-31-36-456212-ros2-virtual-machine-10632
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [robot_state_publisher-1]: process started with pid [10638]
[INFO] [joint_state_publisher_gui-2]: process started with pid [10640]
[INFO] [rviz2-3]: process started with pid [10642]
[robot_state_publisher-1] [WARN] [1701696696.917959925] [robot_state_publisher]: No robot_description parameter, but command-line argument available. Assuming argument is name of URDF file. This backwards compatibility fallback will be removed in the future.
[robot_state_publisher-1] [FATAL] [1701696696.919028357] [robot_state_publisher]: Failed to open URDF file: /home/ros2/chapt8_ws/install/fishbot_description/share/fishbot_description/urdf/fishbot_base.urdf: No such file or directory
[robot_state_publisher-1] terminate called after throwing an instance of 'std::system_error'
[robot_state_publisher-1] what(): Failed to open URDF file: /home/ros2/chapt8_ws/install/fishbot_description/share/fishbot_description/urdf/fishbot_base.urdf: No such file or directory
[rviz2-3] qt.qpa.plugin: Could not find the Qt platform plugin "wayland" in ""
[joint_state_publisher_gui-2] qt.qpa.plugin: Could not find the Qt platform plugin "wayland" in ""
[rviz2-3] [INFO] [1701696698.245036043] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-3] [INFO] [1701696698.245313097] [rviz2]: OpenGl version: 4.3 (GLSL 4.3)
[rviz2-3] [INFO] [1701696698.527562561] [rviz2]: Stereo is NOT SUPPORTED
[joint_state_publisher_gui-2] Traceback (most recent call last):
[joint_state_publisher_gui-2] File "/opt/ros/humble/lib/joint_state_publisher_gui/joint_state_publisher_gui", line 33, in <module>
[joint_state_publisher_gui-2] sys.exit(load_entry_point('joint-state-publisher-gui==2.4.0', 'console_scripts', 'joint_state_publisher_gui')())
[joint_state_publisher_gui-2] File "/opt/ros/humble/lib/python3.10/site-packages/joint_state_publisher_gui/joint_state_publisher_gui.py", line 284, in main
[joint_state_publisher_gui-2] JointStatePublisher(parsed_args.urdf_file))
[joint_state_publisher_gui-2] File "/opt/ros/humble/lib/python3.10/site-packages/joint_state_publisher/joint_state_publisher.py", line 302, in init
[joint_state_publisher_gui-2] with open(description_file, 'r') as infp:
[joint_state_publisher_gui-2] FileNotFoundError: [Errno 2] 没有那个文件或目录: '/home/ros2/chapt8_ws/install/fishbot_description/share/fishbot_description/urdf/fishbot_base.urdf'
[ERROR] [joint_state_publisher_gui-2]: process has died [pid 10640, exit code 1, cmd '/opt/ros/humble/lib/joint_state_publisher_gui/joint_state_publisher_gui /home/ros2/chapt8_ws/install/fishbot_description/share/fishbot_description/urdf/fishbot_base.urdf --ros-args -r __node:=joint_state_publisher_gui'].
[ERROR] [robot_state_publisher-1]: process has died [pid 10638, exit code -6, cmd '/opt/ros/humble/lib/robot_state_publisher/robot_state_publisher /home/ros2/chapt8_ws/install/fishbot_description/share/fishbot_description/urdf/fishbot_base.urdf --ros-args'].
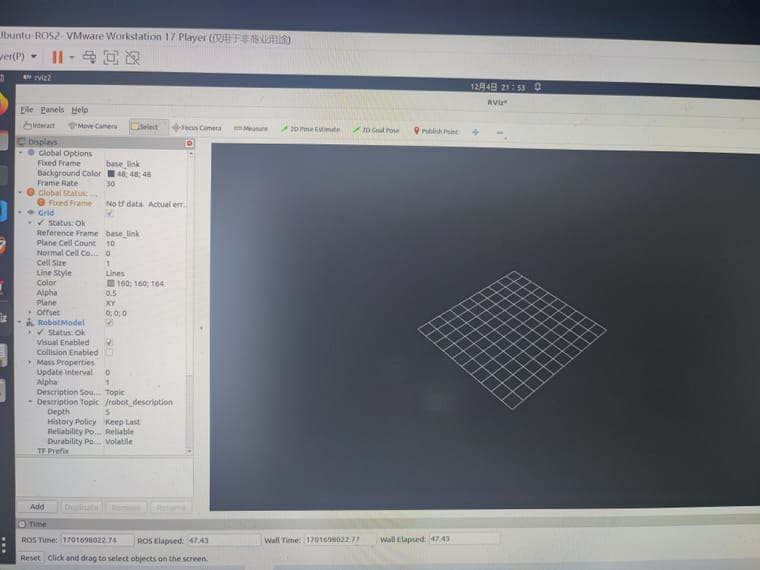
RVIZ2中没有显示所建立的模型 -
MicroROS开发时将程序烧录失败错误代码发布在 MicroROS
使用的22.04ubuntu虚拟机humble
开发板采用的是Arduino uno -R3
波特率是115200
串口没问题,只调用了这一个串口
线好像也没问题
能查到的解决办法都试过了,还没有解决
正在文件夹 example01_helloworld 中执行任务: platformio run --target uploadProcessing featheresp32 (platform: espressif32; board: featheresp32; framework: arduino)
Verbose mode can be enabled via
-v, --verboseoption
CONFIGURATION: https://docs.platformio.org/page/boards/espressif32/featheresp32.html
PLATFORM: Espressif 32 (6.0.1) > Adafruit ESP32 Feather
HARDWARE: ESP32 240MHz, 320KB RAM, 4MB Flash
DEBUG: Current (cmsis-dap) External (cmsis-dap, esp-bridge, esp-prog, iot-bus-jtag, jlink, minimodule, olimex-arm-usb-ocd, olimex-arm-usb-ocd-h, olimex-arm-usb-tiny-h, olimex-jtag-tiny, tumpa)
PACKAGES:- framework-arduinoespressif32 @ 3.20006.221224 (2.0.6)
- tool-esptoolpy @ 1.40400.0 (4.4.0)
- tool-mkfatfs @ 2.0.1
- tool-mklittlefs @ 1.203.210628 (2.3)
- tool-mkspiffs @ 2.230.0 (2.30)
- toolchain-xtensa-esp32 @ 8.4.0+2021r2-patch5
LDF: Library Dependency Finder -> https://bit.ly/configure-pio-ldf
LDF Modes: Finder ~ chain, Compatibility ~ soft
Found 33 compatible libraries
Scanning dependencies...
No dependencies
Building in release mode
Retrieving maximum program size .pio/build/featheresp32/firmware.elf
Checking size .pio/build/featheresp32/firmware.elf
Advanced Memory Usage is available via "PlatformIO Home > Project Inspect"
RAM: [= ] 6.8% (used 22160 bytes from 327680 bytes)
Flash: [== ] 19.9% (used 261357 bytes from 1310720 bytes)
Configuring upload protocol...
AVAILABLE: cmsis-dap, esp-bridge, esp-prog, espota, esptool, iot-bus-jtag, jlink, minimodule, olimex-arm-usb-ocd, olimex-arm-usb-ocd-h, olimex-arm-usb-tiny-h, olimex-jtag-tiny, tumpa
CURRENT: upload_protocol = esptool
Looking for upload port...
Auto-detected: /dev/ttyUSB0
Uploading .pio/build/featheresp32/firmware.bin
esptool.py v4.4
Serial port /dev/ttyUSB0
Connecting......................................
A fatal error occurred: Failed to connect to ESP32: No serial data received.
For troubleshooting steps visit: https://docs.espressif.com/projects/esptool/en/latest/troubleshooting.html
*** [upload] Error 2