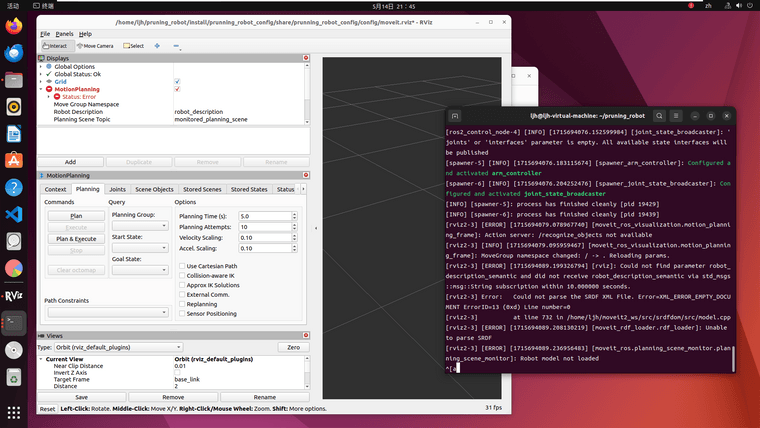
配置完成moveit_setup_assistan,编译后运行demo.launch.py无法加载机器人模型,ubuntu22.04,ros2-humble
-
ty@ty-Precision-M2800:~/ty_kr30$ ros2 launch kr30_moveit_config demo.launch.py [INFO] [launch]: All log files can be found below /home/ty/.ros/log/2023-02-18-22-36-03-986066-ty-Precision-M2800-13395 [INFO] [launch]: Default logging verbosity is set to INFO [INFO] [robot_state_publisher-1]: process started with pid [13399] [INFO] [move_group-2]: process started with pid [13401] [INFO] [rviz2-3]: process started with pid [13403] [INFO] [ros2_control_node-4]: process started with pid [13405] [INFO] [spawner-5]: process started with pid [13407] [INFO] [spawner-6]: process started with pid [13409] [rviz2-3] qt.qpa.plugin: Could not find the Qt platform plugin "wayland" in "" [ros2_control_node-4] [INFO] [1676730964.611351447] [resource_manager]: Loading hardware 'FakeSystem' [ros2_control_node-4] [INFO] [1676730964.612011743] [resource_manager]: Initialize hardware 'FakeSystem' [ros2_control_node-4] [WARN] [1676730964.612081165] [mock_generic_system]: Parsing of optional initial interface values failed or uses a deprecated format. Add initial values for every state interface in the ros2_control.xacro. For example: [ros2_control_node-4] <state_interface name="velocity"> [ros2_control_node-4] <param name="initial_value">0.0</param> [ros2_control_node-4] </state_interface> [ros2_control_node-4] [INFO] [1676730964.612100144] [resource_manager]: Successful initialization of hardware 'FakeSystem' [ros2_control_node-4] [INFO] [1676730964.612159080] [resource_manager]: 'configure' hardware 'FakeSystem' [ros2_control_node-4] [INFO] [1676730964.612170708] [resource_manager]: Successful 'configure' of hardware 'FakeSystem' [ros2_control_node-4] [INFO] [1676730964.612179810] [resource_manager]: 'activate' hardware 'FakeSystem' [ros2_control_node-4] [INFO] [1676730964.612187791] [resource_manager]: Successful 'activate' of hardware 'FakeSystem' [ros2_control_node-4] [INFO] [1676730964.621509489] [controller_manager]: update rate is 100 Hz [ros2_control_node-4] [INFO] [1676730964.623343392] [controller_manager]: RT kernel is recommended for better performance [robot_state_publisher-1] [INFO] [1676730964.632879550] [robot_state_publisher]: got segment base_link [robot_state_publisher-1] [INFO] [1676730964.633008144] [robot_state_publisher]: got segment flan [robot_state_publisher-1] [INFO] [1676730964.633025438] [robot_state_publisher]: got segment link1 [robot_state_publisher-1] [INFO] [1676730964.633036081] [robot_state_publisher]: got segment link2 [robot_state_publisher-1] [INFO] [1676730964.633044644] [robot_state_publisher]: got segment link3 [robot_state_publisher-1] [INFO] [1676730964.633052710] [robot_state_publisher]: got segment link4 [robot_state_publisher-1] [INFO] [1676730964.633060553] [robot_state_publisher]: got segment link5 [robot_state_publisher-1] [INFO] [1676730964.633069224] [robot_state_publisher]: got segment link6 [robot_state_publisher-1] [INFO] [1676730964.633078738] [robot_state_publisher]: got segment world [move_group-2] [INFO] [1676730964.648502068] [moveit_rdf_loader.rdf_loader]: Loaded robot model in 0.00512618 seconds [move_group-2] [INFO] [1676730964.648621234] [moveit_robot_model.robot_model]: Loading robot model 'kr30'... [move_group-2] [INFO] [1676730964.648637307] [moveit_robot_model.robot_model]: No root/virtual joint specified in SRDF. Assuming fixed joint [move_group-2] terminate called after throwing an instance of 'rclcpp::exceptions::InvalidParameterTypeException' [move_group-2] what(): parameter 'robot_description_planning.joint_limits.joint1.max_velocity' has invalid type: expected [double] got [integer] [move_group-2] Stack trace (most recent call last): [move_group-2] #18 Object "", at 0xffffffffffffffff, in [move_group-2] #17 Object "/opt/ros/humble/lib/moveit_ros_move_group/move_group", at 0x564ae0c5e784, in _start [move_group-2] #16 Source "../csu/libc-start.c", line 392, in __libc_start_main_impl [0x7fb1ac8cce3f] [move_group-2] #15 Source "../sysdeps/nptl/libc_start_call_main.h", line 58, in __libc_start_call_main [0x7fb1ac8ccd8f] [move_group-2] #14 | Source "./src/move_group.cpp", line 276, in make_shared<moveit_cpp::MoveItCpp, std::shared_ptr<rclcpp::Node>&, moveit_cpp::MoveItCpp::Options&, const std::shared_ptr<tf2_ros::Buffer>&> [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr.h", line 879, in allocate_shared<moveit_cpp::MoveItCpp, std::allocator<moveit_cpp::MoveItCpp>, std::shared_ptr<rclcpp::Node>&, moveit_cpp::MoveItCpp::Options&, const std::shared_ptr<tf2_ros::Buffer>&> [move_group-2] | 877: typedef typename std::remove_cv<_Tp>::type _Tp_nc; [move_group-2] | 878: return std::allocate_shared<_Tp>(std::allocator<_Tp_nc>(), [move_group-2] | > 879: std::forward<_Args>(__args)...); [move_group-2] | 880: } [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr.h", line 863, in shared_ptr<std::allocator<moveit_cpp::MoveItCpp>, std::shared_ptr<rclcpp::Node>&, moveit_cpp::MoveItCpp::Options&, const std::shared_ptr<tf2_ros::Buffer>&> [move_group-2] | 862: return shared_ptr<_Tp>(_Sp_alloc_shared_tag<_Alloc>{__a}, [move_group-2] | > 863: std::forward<_Args>(__args)...); [move_group-2] | 864: } [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr.h", line 409, in __shared_ptr<std::allocator<moveit_cpp::MoveItCpp>, std::shared_ptr<rclcpp::Node>&, moveit_cpp::MoveItCpp::Options&, const std::shared_ptr<tf2_ros::Buffer>&> [move_group-2] | 407: template<typename _Alloc, typename... _Args> [move_group-2] | 408: shared_ptr(_Sp_alloc_shared_tag<_Alloc> __tag, _Args&&... __args) [move_group-2] | > 409: : __shared_ptr<_Tp>(__tag, std::forward<_Args>(__args)...) [move_group-2] | 410: { } [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr_base.h", line 1342, in __shared_count<moveit_cpp::MoveItCpp, std::allocator<moveit_cpp::MoveItCpp>, std::shared_ptr<rclcpp::Node>&, moveit_cpp::MoveItCpp::Options&, const std::shared_ptr<tf2_ros::Buffer>&> [move_group-2] | 1340: template<typename _Alloc, typename... _Args> [move_group-2] | 1341: __shared_ptr(_Sp_alloc_shared_tag<_Alloc> __tag, _Args&&... __args) [move_group-2] | >1342: : _M_ptr(), _M_refcount(_M_ptr, __tag, std::forward<_Args>(__args)...) [move_group-2] | 1343: { _M_enable_shared_from_this_with(_M_ptr); } [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr_base.h", line 650, in _Sp_counted_ptr_inplace<std::shared_ptr<rclcpp::Node>&, moveit_cpp::MoveItCpp::Options&, const std::shared_ptr<tf2_ros::Buffer>&> [move_group-2] | 648: auto __guard = std::__allocate_guarded(__a2); [move_group-2] | 649: _Sp_cp_type* __mem = __guard.get(); [move_group-2] | > 650: auto __pi = ::new (__mem) [move_group-2] | 651: _Sp_cp_type(__a._M_a, std::forward<_Args>(__args)...); [move_group-2] | 652: __guard = nullptr; [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr_base.h", line 519, in construct<moveit_cpp::MoveItCpp, std::shared_ptr<rclcpp::Node>&, moveit_cpp::MoveItCpp::Options&, const std::shared_ptr<tf2_ros::Buffer>&> [move_group-2] | 517: // _GLIBCXX_RESOLVE_LIB_DEFECTS [move_group-2] | 518: // 2070. allocate_shared should use allocator_traits<A>::construct [move_group-2] | > 519: allocator_traits<_Alloc>::construct(__a, _M_ptr(), [move_group-2] | 520: std::forward<_Args>(__args)...); // might throw [move_group-2] | 521: } [move_group-2] | Source "/usr/include/c++/11/bits/alloc_traits.h", line 516, in construct<moveit_cpp::MoveItCpp, std::shared_ptr<rclcpp::Node>&, moveit_cpp::MoveItCpp::Options&, const std::shared_ptr<tf2_ros::Buffer>&> [move_group-2] | 514: { [move_group-2] | 515: #if __cplusplus <= 201703L [move_group-2] | > 516: __a.construct(__p, std::forward<_Args>(__args)...); [move_group-2] | 517: #else [move_group-2] | 518: std::construct_at(__p, std::forward<_Args>(__args)...); [move_group-2] | Source "/usr/include/c++/11/ext/new_allocator.h", line 162, in MoveItCpp [move_group-2] | 160: construct(_Up* __p, _Args&&... __args) [move_group-2] | 161: noexcept(std::is_nothrow_constructible<_Up, _Args...>::value) [move_group-2] | > 162: { ::new((void *)__p) _Up(std::forward<_Args>(__args)...); } [move_group-2] | 163: [move_group-2] | 164: template<typename _Up> [move_group-2] Source "/opt/ros/humble/include/moveit/moveit_cpp/moveit_cpp.h", line 119, in main [0x564ae0c5d322] [move_group-2] 116: MoveItCpp(const rclcpp::Node::SharedPtr& node); [move_group-2] 117: [[deprecated("Passing tf2_ros::Buffer to MoveItCpp's constructor is deprecated")]] MoveItCpp( [move_group-2] 118: const rclcpp::Node::SharedPtr& node, const Options& options, const std::shared_ptr<tf2_ros::Buffer>& /* unused */) [move_group-2] > 119: : MoveItCpp(node, options) [move_group-2] 120: { [move_group-2] 121: } [move_group-2] 122: MoveItCpp(const rclcpp::Node::SharedPtr& node, const Options& options); [move_group-2] #13 Source "./moveit_cpp/src/moveit_cpp.cpp", line 56, in MoveItCpp [0x7fb1ad20d094] [move_group-2] #12 | Source "./moveit_cpp/src/moveit_cpp.cpp", line 95, in make_shared<planning_scene_monitor::PlanningSceneMonitor, std::shared_ptr<rclcpp::Node>&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&> [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr.h", line 879, in allocate_shared<planning_scene_monitor::PlanningSceneMonitor, std::allocator<planning_scene_monitor::PlanningSceneMonitor>, std::shared_ptr<rclcpp::Node>&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&> [move_group-2] | 877: typedef typename std::remove_cv<_Tp>::type _Tp_nc; [move_group-2] | 878: return std::allocate_shared<_Tp>(std::allocator<_Tp_nc>(), [move_group-2] | > 879: std::forward<_Args>(__args)...); [move_group-2] | 880: } [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr.h", line 863, in shared_ptr<std::allocator<planning_scene_monitor::PlanningSceneMonitor>, std::shared_ptr<rclcpp::Node>&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&> [move_group-2] | 862: return shared_ptr<_Tp>(_Sp_alloc_shared_tag<_Alloc>{__a}, [move_group-2] | > 863: std::forward<_Args>(__args)...); [move_group-2] | 864: } [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr.h", line 409, in __shared_ptr<std::allocator<planning_scene_monitor::PlanningSceneMonitor>, std::shared_ptr<rclcpp::Node>&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&> [move_group-2] | 407: template<typename _Alloc, typename... _Args> [move_group-2] | 408: shared_ptr(_Sp_alloc_shared_tag<_Alloc> __tag, _Args&&... __args) [move_group-2] | > 409: : __shared_ptr<_Tp>(__tag, std::forward<_Args>(__args)...) [move_group-2] | 410: { } [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr_base.h", line 1342, in __shared_count<planning_scene_monitor::PlanningSceneMonitor, std::allocator<planning_scene_monitor::PlanningSceneMonitor>, std::shared_ptr<rclcpp::Node>&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&> [move_group-2] | 1340: template<typename _Alloc, typename... _Args> [move_group-2] | 1341: __shared_ptr(_Sp_alloc_shared_tag<_Alloc> __tag, _Args&&... __args) [move_group-2] | >1342: : _M_ptr(), _M_refcount(_M_ptr, __tag, std::forward<_Args>(__args)...) [move_group-2] | 1343: { _M_enable_shared_from_this_with(_M_ptr); } [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr_base.h", line 650, in _Sp_counted_ptr_inplace<std::shared_ptr<rclcpp::Node>&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&> [move_group-2] | 648: auto __guard = std::__allocate_guarded(__a2); [move_group-2] | 649: _Sp_cp_type* __mem = __guard.get(); [move_group-2] | > 650: auto __pi = ::new (__mem) [move_group-2] | 651: _Sp_cp_type(__a._M_a, std::forward<_Args>(__args)...); [move_group-2] | 652: __guard = nullptr; [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr_base.h", line 519, in construct<planning_scene_monitor::PlanningSceneMonitor, std::shared_ptr<rclcpp::Node>&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&> [move_group-2] | 517: // _GLIBCXX_RESOLVE_LIB_DEFECTS [move_group-2] | 518: // 2070. allocate_shared should use allocator_traits<A>::construct [move_group-2] | > 519: allocator_traits<_Alloc>::construct(__a, _M_ptr(), [move_group-2] | 520: std::forward<_Args>(__args)...); // might throw [move_group-2] | 521: } [move_group-2] | Source "/usr/include/c++/11/bits/alloc_traits.h", line 516, in construct<planning_scene_monitor::PlanningSceneMonitor, std::shared_ptr<rclcpp::Node>&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&> [move_group-2] | 514: { [move_group-2] | 515: #if __cplusplus <= 201703L [move_group-2] | > 516: __a.construct(__p, std::forward<_Args>(__args)...); [move_group-2] | 517: #else [move_group-2] | 518: std::construct_at(__p, std::forward<_Args>(__args)...); [move_group-2] Source "/usr/include/c++/11/ext/new_allocator.h", line 162, in loadPlanningSceneMonitor [0x7fb1ad20aa3b] [move_group-2] 159: void [move_group-2] 160: construct(_Up* __p, _Args&&... __args) [move_group-2] 161: noexcept(std::is_nothrow_constructible<_Up, _Args...>::value) [move_group-2] > 162: { ::new((void *)__p) _Up(std::forward<_Args>(__args)...); } [move_group-2] 163: [move_group-2] 164: template<typename _Up> [move_group-2] 165: void [rviz2-3] [INFO] [1676730964.928104821] [rviz2]: Stereo is NOT SUPPORTED [rviz2-3] [INFO] [1676730964.928224806] [rviz2]: OpenGl version: 3.1 (GLSL 1.4) [spawner-5] [INFO] [1676730964.937592413] [spawner_test1_controller]: Waiting for '/controller_manager' node to exist [rviz2-3] [INFO] [1676730964.953507269] [rviz2]: Stereo is NOT SUPPORTED [spawner-6] [INFO] [1676730964.957732442] [spawner_joint_state_broadcaster]: Waiting for '/controller_manager' node to exist [rviz2-3] Warning: class_loader.impl: SEVERE WARNING!!! A namespace collision has occurred with plugin factory for class rviz_default_plugins::displays::InteractiveMarkerDisplay. New factory will OVERWRITE existing one. This situation occurs when libraries containing plugins are directly linked against an executable (the one running right now generating this message). Please separate plugins out into their own library or just don't link against the library and use either class_loader::ClassLoader/MultiLibraryClassLoader to open. [rviz2-3] at line 253 in /opt/ros/humble/include/class_loader/class_loader/class_loader_core.hpp [move_group-2] #11 Source "./planning_scene_monitor/src/planning_scene_monitor.cpp", line 70, in PlanningSceneMonitor [0x7fb1ad12e60a] [move_group-2] #10 | Source "./planning_scene_monitor/src/planning_scene_monitor.cpp", line 77, in make_shared<robot_model_loader::RobotModelLoader, const std::shared_ptr<rclcpp::Node>&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&> [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr.h", line 879, in allocate_shared<robot_model_loader::RobotModelLoader, std::allocator<robot_model_loader::RobotModelLoader>, const std::shared_ptr<rclcpp::Node>&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&> [move_group-2] | 877: typedef typename std::remove_cv<_Tp>::type _Tp_nc; [move_group-2] | 878: return std::allocate_shared<_Tp>(std::allocator<_Tp_nc>(), [move_group-2] | > 879: std::forward<_Args>(__args)...); [move_group-2] | 880: } [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr.h", line 863, in shared_ptr<std::allocator<robot_model_loader::RobotModelLoader>, const std::shared_ptr<rclcpp::Node>&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&> [move_group-2] | 862: return shared_ptr<_Tp>(_Sp_alloc_shared_tag<_Alloc>{__a}, [move_group-2] | > 863: std::forward<_Args>(__args)...); [move_group-2] | 864: } [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr.h", line 409, in __shared_ptr<std::allocator<robot_model_loader::RobotModelLoader>, const std::shared_ptr<rclcpp::Node>&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&> [move_group-2] | 407: template<typename _Alloc, typename... _Args> [move_group-2] | 408: shared_ptr(_Sp_alloc_shared_tag<_Alloc> __tag, _Args&&... __args) [move_group-2] | > 409: : __shared_ptr<_Tp>(__tag, std::forward<_Args>(__args)...) [move_group-2] | 410: { } [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr_base.h", line 1342, in __shared_count<robot_model_loader::RobotModelLoader, std::allocator<robot_model_loader::RobotModelLoader>, const std::shared_ptr<rclcpp::Node>&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&> [move_group-2] | 1340: template<typename _Alloc, typename... _Args> [move_group-2] | 1341: __shared_ptr(_Sp_alloc_shared_tag<_Alloc> __tag, _Args&&... __args) [move_group-2] | >1342: : _M_ptr(), _M_refcount(_M_ptr, __tag, std::forward<_Args>(__args)...) [move_group-2] | 1343: { _M_enable_shared_from_this_with(_M_ptr); } [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr_base.h", line 650, in _Sp_counted_ptr_inplace<const std::shared_ptr<rclcpp::Node>&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&> [move_group-2] | 648: auto __guard = std::__allocate_guarded(__a2); [move_group-2] | 649: _Sp_cp_type* __mem = __guard.get(); [move_group-2] | > 650: auto __pi = ::new (__mem) [move_group-2] | 651: _Sp_cp_type(__a._M_a, std::forward<_Args>(__args)...); [move_group-2] | 652: __guard = nullptr; [move_group-2] | Source "/usr/include/c++/11/bits/shared_ptr_base.h", line 519, in construct<robot_model_loader::RobotModelLoader, const std::shared_ptr<rclcpp::Node>&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&> [move_group-2] | 517: // _GLIBCXX_RESOLVE_LIB_DEFECTS [move_group-2] | 518: // 2070. allocate_shared should use allocator_traits<A>::construct [move_group-2] | > 519: allocator_traits<_Alloc>::construct(__a, _M_ptr(), [move_group-2] | 520: std::forward<_Args>(__args)...); // might throw [move_group-2] | 521: } [move_group-2] | Source "/usr/include/c++/11/bits/alloc_traits.h", line 516, in construct<robot_model_loader::RobotModelLoader, const std::shared_ptr<rclcpp::Node>&, const std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >&> [move_group-2] | 514: { [move_group-2] | 515: #if __cplusplus <= 201703L [move_group-2] | > 516: __a.construct(__p, std::forward<_Args>(__args)...); [move_group-2] | 517: #else [move_group-2] | 518: std::construct_at(__p, std::forward<_Args>(__args)...); [move_group-2] Source "/usr/include/c++/11/ext/new_allocator.h", line 162, in PlanningSceneMonitor [0x7fb1ad12e55a] [move_group-2] 159: void [move_group-2] 160: construct(_Up* __p, _Args&&... __args) [move_group-2] 161: noexcept(std::is_nothrow_constructible<_Up, _Args...>::value) [move_group-2] > 162: { ::new((void *)__p) _Up(std::forward<_Args>(__args)...); } [move_group-2] 163: [move_group-2] 164: template<typename _Up> [move_group-2] 165: void [ros2_control_node-4] [INFO] [1676730965.150917967] [controller_manager]: Loading controller 'test1_controller' [ros2_control_node-4] [INFO] [1676730965.170931021] [joint_trajectory_controller.interpolation_methods]: No interpolation method parameter was given. Using the default, VARIABLE_DEGREE_SPLINE. [move_group-2] #9 Source "./robot_model_loader/src/robot_model_loader.cpp", line 56, in RobotModelLoader [0x7fb1ac454c1e] [spawner-5] [INFO] [1676730965.176573960] [spawner_test1_controller]: Loaded test1_controller [ros2_control_node-4] [INFO] [1676730965.177056663] [controller_manager]: Loading controller 'joint_state_broadcaster' [move_group-2] #8 Source "./robot_model_loader/src/robot_model_loader.cpp", line 199, in configure [0x7fb1ac4533d9] [move_group-2] #7 | Source "/opt/ros/humble/include/rclcpp/rclcpp/node_impl.hpp", line 294, in get_value<double> [move_group-2] | 292: bool result = get_parameter(sub_name, parameter_variant); [move_group-2] | 293: if (result) { [move_group-2] | > 294: parameter = static_cast<ParameterT>(parameter_variant.get_value<ParameterT>()); [move_group-2] | 295: } [move_group-2] Source "/opt/ros/humble/include/rclcpp/rclcpp/parameter.hpp", line 276, in get_parameter<double> [0x7fb1ac44d1a2] [move_group-2] 273: // use the helper to specialize for the ParameterValue and Parameter cases. [move_group-2] 274: return detail::get_value_helper<T>(this); [move_group-2] 275: } catch (const ParameterTypeException & ex) { [move_group-2] > 276: throw exceptions::InvalidParameterTypeException(this->name_, ex.what()); [move_group-2] 277: } [move_group-2] 278: } [move_group-2] 279: /// \endcond [move_group-2] #6 Object "/usr/lib/x86_64-linux-gnu/libstdc++.so.6.0.30", at 0x7fb1acb99517, in __cxa_throw [move_group-2] #5 Object "/usr/lib/x86_64-linux-gnu/libstdc++.so.6.0.30", at 0x7fb1acb992b6, in std::terminate() [move_group-2] #4 Object "/usr/lib/x86_64-linux-gnu/libstdc++.so.6.0.30", at 0x7fb1acb9924b, in [move_group-2] #3 Object "/usr/lib/x86_64-linux-gnu/libstdc++.so.6.0.30", at 0x7fb1acb8dbbd, in [move_group-2] #2 Source "./stdlib/abort.c", line 79, in abort [0x7fb1ac8cb7f2] [move_group-2] #1 Source "../sysdeps/posix/raise.c", line 26, in raise [0x7fb1ac8e5475] [move_group-2] #0 | Source "./nptl/pthread_kill.c", line 89, in __pthread_kill_internal [move_group-2] | Source "./nptl/pthread_kill.c", line 78, in __pthread_kill_implementation [move_group-2] Source "./nptl/pthread_kill.c", line 44, in __pthread_kill [0x7fb1ac939a7c] [move_group-2] Aborted (Signal sent by tkill() 13401 1000) [ros2_control_node-4] [INFO] [1676730965.195230716] [controller_manager]: Configuring controller 'test1_controller' [ros2_control_node-4] [INFO] [1676730965.195370297] [test1_controller]: No specific joint names are used for command interfaces. Using 'joints' parameter. [ros2_control_node-4] [INFO] [1676730965.195407375] [test1_controller]: Command interfaces are [position] and state interfaces are [position velocity]. [ros2_control_node-4] [INFO] [1676730965.195426888] [joint_trajectory_controller.interpolation_methods]: No interpolation method parameter was given. Using the default, VARIABLE_DEGREE_SPLINE. [ros2_control_node-4] [INFO] [1676730965.195432333] [test1_controller]: Using 'splines' interpolation method. [spawner-6] [INFO] [1676730965.196752345] [spawner_joint_state_broadcaster]: Loaded joint_state_broadcaster [ros2_control_node-4] [INFO] [1676730965.197274937] [test1_controller]: Controller state will be published at 50.00 Hz. [ros2_control_node-4] [INFO] [1676730965.199557571] [test1_controller]: Action status changes will be monitored at 20.00 Hz. [ros2_control_node-4] [INFO] [1676730965.205743438] [controller_manager]: Configuring controller 'joint_state_broadcaster' [ros2_control_node-4] [INFO] [1676730965.205939487] [joint_state_broadcaster]: 'joints' or 'interfaces' parameter is empty. All available state interfaces will be published [spawner-5] [INFO] [1676730965.227387257] [spawner_test1_controller]: Configured and activated test1_controller [spawner-6] [INFO] [1676730965.246487210] [spawner_joint_state_broadcaster]: Configured and activated joint_state_broadcaster [ERROR] [move_group-2]: process has died [pid 13401, exit code -6, cmd '/opt/ros/humble/lib/moveit_ros_move_group/move_group --ros-args --params-file /tmp/launch_params__je_a9ib --params-file /tmp/launch_params_gv_cypwz']. [INFO] [spawner-5]: process has finished cleanly [pid 13407] [INFO] [spawner-6]: process has finished cleanly [pid 13409] [rviz2-3] [ERROR] [1676730968.079735790] [moveit_ros_visualization.motion_planning_frame]: Action server: /recognize_objects not available [rviz2-3] [INFO] [1676730968.090797426] [moveit_ros_visualization.motion_planning_frame]: MoveGroup namespace changed: / -> . Reloading params. [rviz2-3] [ERROR] [1676730978.179956977] [rviz]: Could not find parameter robot_description_semantic and did not receive robot_description_semantic via std_msgs::msg::String subscription within 10.000000 seconds. [rviz2-3] Error: Could not parse the SRDF XML File. Error=XML_ERROR_EMPTY_DOCUMENT ErrorID=13 (0xd) Line number=0 [rviz2-3] at line 715 in ./src/model.cpp [rviz2-3] [ERROR] [1676730978.186913293] [moveit_rdf_loader.rdf_loader]: Unable to parse SRDF [rviz2-3] [ERROR] [1676730978.196885892] [moveit_ros.planning_scene_monitor.planning_scene_monitor]: Robot model not loaded ^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT) [robot_state_publisher-1] [INFO] [1676730982.454146531] [rclcpp]: signal_handler(signum=2) [ros2_control_node-4] [INFO] [1676730982.454165159] [rclcpp]: signal_handler(signum=2) [rviz2-3] [INFO] [1676730982.454167088] [rclcpp]: signal_handler(signum=2) [INFO] [robot_state_publisher-1]: process has finished cleanly [pid 13399] [INFO] [ros2_control_node-4]: process has finished cleanly [pid 13405] [ERROR] [rviz2-3]: process has died [pid 13403, exit code -11, cmd '/opt/ros/humble/lib/rviz2/rviz2 -d /home/ty/ty_kr30/install/kr30_moveit_config/share/kr30_moveit_config/config/moveit.rviz --ros-args --params-file /tmp/launch_params_jhm254us --params-file /tmp/launch_params_bo8c1tee']. -
@768672278 大概率是URDF文件问题,直接导出后的文件需要修改下才能用,可以对比下教程中的URDF
-
-
@835082281 估计是机械臂模型问题,建议先跟着我教程中的机械臂试试
-
@小鱼 确实是模型的问题,用小鱼老师教程的模型完全没问题、我的模型是工业机械臂,用solidworks2016转的URDF,小鱼老师有什么可以解决模型问题的方法吗?感谢
-
我也出现了相同的问题,这个模型会是哪里存在问题呢?不知道楼主有没有解决这个问题?
-
@757225359 把urdf文件中的velocity相关的数值改成double类型,例如velocity="2.0" 也需要改成 velocity="2.000001"
-
@835082281 把urdf文件中的velocity相关的数值改成double类型,例如velocity="2.0" 也需要改成 velocity="2.000001"
-
@kangkang-li 我是了一下也不可以求指导一下,一直解决不了,我的模型时sw导出来的我看好多人也是sw导出来用不了
-
打开官方样例:ros2 launch moveit2_tutorials demo.launch.py rviz_tutorial:=true的时候,提示ackage 'moveit2_tutorials' not found: "package 'moveit2_tutorials' not found, searching: ['/opt/ros/humble']"咋回事,鱼哥
-
您好,一样的问题,请问解决了吗,我也是用SW转的urdf不对,用鱼哥的就没事,请问后边如何解决的,求!!!!!
-
@768672278 我是使用sw2rudf将sw2022版本中的sw文件转换为urdf文件的,之后使用moveit_setup_assistant将配置的此urdf文件,在moveit_setup_assistant中能够加载我的模型,但是配置完成之后打开运行demo.launch之后就无法加载我的模型了。请问是配置问题还是我的URDF文件问题,如果是URDF文件问题应该如何正确由SW文件生成URDF文件,
-
@768672278 我也是这样不知道兄弟你解决了没有
-
@768672278 大概率是URDF文件问题,直接导出后的文件需要修改下才能用,可以对比下教程中的URDF
-
 小 小鱼 将这个主题标记为已解决,在
小 小鱼 将这个主题标记为已解决,在
-
@kangkang-li
大佬,解决了,请受遥远的小弟一拜!
-
@kangkang-li 太感谢了!!!!
-
如果修改完前面大佬提到的urdf文件中的velocity数字还加载不出来的话,接着去修改功能包config目录下的joint_limits.yaml中的max_velocity数值。
出现问题是因为报错了what(): parameter 'robot_description_planning.joint_limits.joint1.max_velocity' has invalid type: expected [double] got [integer] -
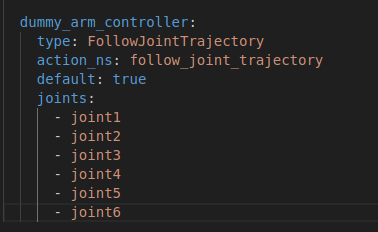
@为什么要弹春日影啊 如果成功导入了机器人模型,plan&execute后出现Failed失败情况,在moveit_controller.yaml添加内容:
action_ns: follow_joint_trajectory
default: true
-
@kangkang-li ;解决了,谢谢大佬