rosdep是什么?怎么用
-
rosdep是 ROS(机器人操作系统)中的一个工具,用于安装系统依赖项。ROS是一个用于构建机器人软件的开源框架,它依赖于许多系统级别的软件包。rosdep的作用是帮助用户轻松地安装这些系统依赖项。使用
rosdep有一些步骤:-
初始化: 在使用
rosdep之前,你需要初始化rosdep数据库。这可以通过以下命令完成:sudo rosdep init rosdep update这将初始化
rosdep并从网络上获取最新的依赖项数据。 -
安装依赖项: 一旦初始化完成,你可以使用
rosdep安装系统依赖项。例如:rosdep install --from-paths your_package_directory --ignore-src这将尝试安装你的ROS软件包所需的所有系统依赖项。
- 可不可以不 init 和 update: 在某些情况下,如果你知道系统中已经存在所需的依赖项,你可能不需要运行
rosdep init和rosdep update。通常建议在使用rosdep之前运行这两个命令,如果你不是用rosdep则可以不用。
rosdep 可以不可以被替代
在某些情况下,你可以使用
apt(Advanced Package Tool,Ubuntu和Debian Linux系统上的包管理工具)来安装ROS软件包的系统依赖项,而不是依赖于rosdep。这尤其适用于那些已经包含在Linux发行版软件仓库中的标准软件包。使用
apt安装ROS软件包的系统依赖项的步骤如下:-
查找依赖项: 使用以下命令查找ROS软件包所需的系统依赖项。
sudo apt-get install ros-<distro>-<package-name>其中
<distro>是你正在使用的ROS发行版,而<package-name>是你要安装的ROS软件包的名称。 -
安装依赖项: 运行
apt安装命令安装找到的依赖项。sudo apt-get install <dependency-package-name>替换
<dependency-package-name>为实际的系统依赖项包名称。
请注意,对于某些ROS软件包,特别是那些不在标准软件仓库中的软件包,
rosdep仍然可能是更好的选择,因为它可以管理ROS软件包的所有依赖项,包括不在系统软件仓库中的软件包。总的来说,可以根据具体情况使用
apt作为rosdep的替代方案,但在涉及ROS特定软件包和依赖项时,rosdep提供了更全面的解决方案。 -
-
G guoxiaoqing2350 在 中 引用了 这个主题
-
2 2431039560 在 中 引用了 这个主题
-
@小鱼 你好,我是一个ros小白,一键安装中的rosdep一键安装再执行rosdepc update以后是不是就不需要再进行rosdep init初始化和rosdep update了?
-
@15721670703 是的
-
@15721670703 请问您执行rosdepc update遇到问题了吗 图片地址)
图片地址) -
-
骑 骑神马驾浮云 在 中 引用了 这个主题
-
@小鱼 在 rosdep是什么?怎么用 中说:
。
-
2 2033478453 在 中 引用了 这个主题
-
rosdepc update时候出现错误
您已经成功安装rosdepc,下面提示的用法中,请将rosdep替换为rosdepc使用~
欢迎使用国内版rosdep之rosdepc,我是作者小鱼!
学习机器人,就关注《鱼香ROS》(公众号|B站|CSDN)!
小鱼rosdepc正式为您服务
reading in sources list data from /etc/ros/rosdep/sources.list.d
ERROR: invalid sources list file:
invalid line:
python3-pytest:小鱼恭喜:rosdepc已为您完成更新!!
小鱼科普:rosdep干什么用的?可以跳过吗?https://fishros.org.cn/forum/topic/2124
如果再使用过程中遇到任何问题,欢迎通过fishros.org.cn反馈,或者加入QQ交流群(139707339)
有没有大佬帮忙解决下 -
2 2033478453 在 中 引用了 这个主题
-
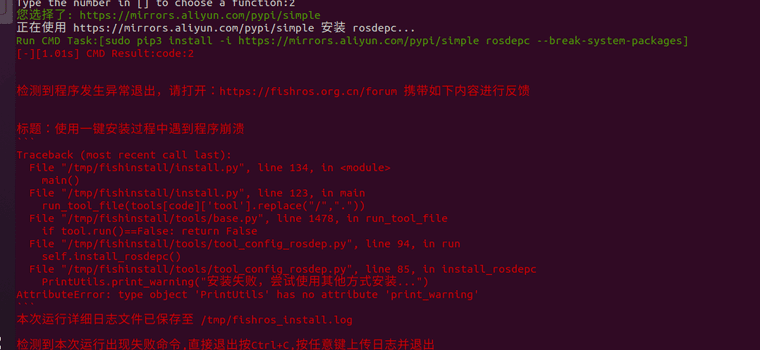 请问大佬这是怎么回事
请问大佬这是怎么回事 -
@root 我也遇到这个问题,这个好像如果直接使用了鱼香的一键下载ros2,那么rosdep就包括了,你可以试试使用下面两个命令进行配置:
sudo rosdep init
rosdep update
然后测试
ros2 run demo_nodes_cpp talker
ros2 run demo_nodes_py listener
能运行起来应该没问题的