-
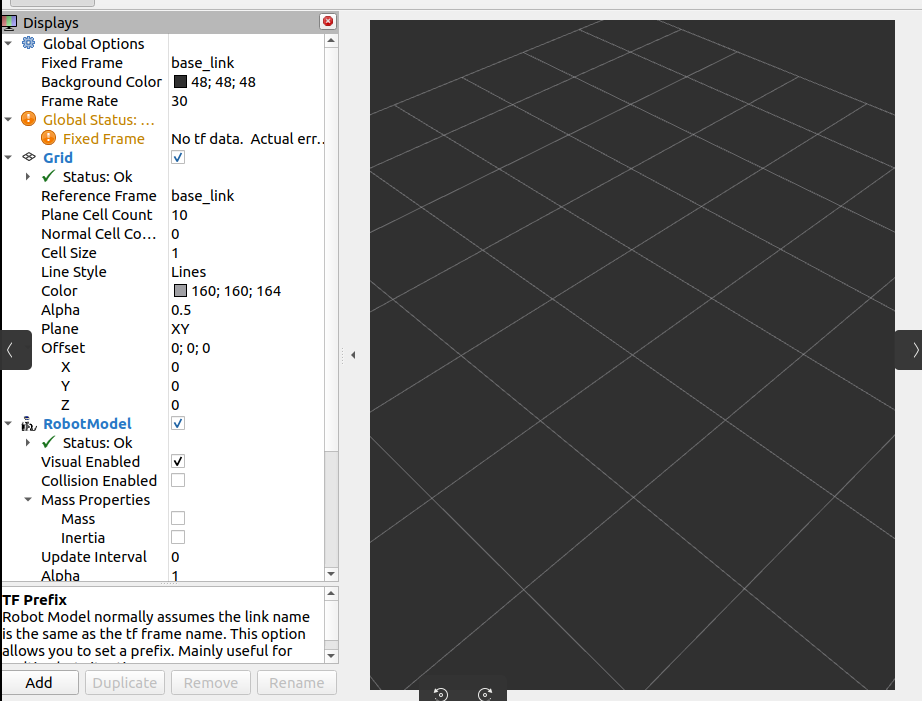
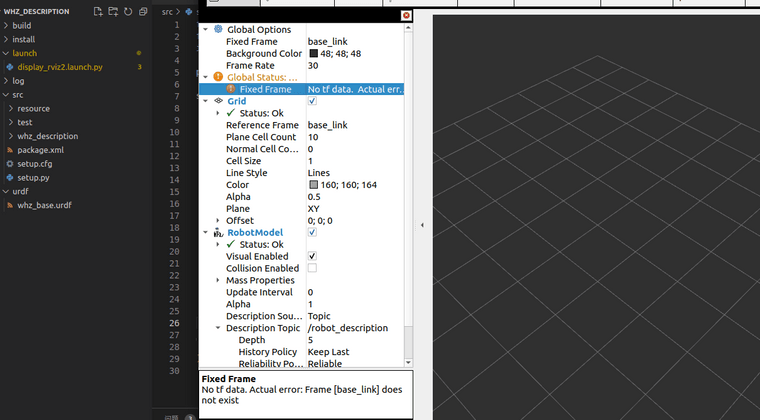
我不太清楚我的问题出在哪里,就设置完不显示模型,麻烦大佬们帮忙看一下
-
-
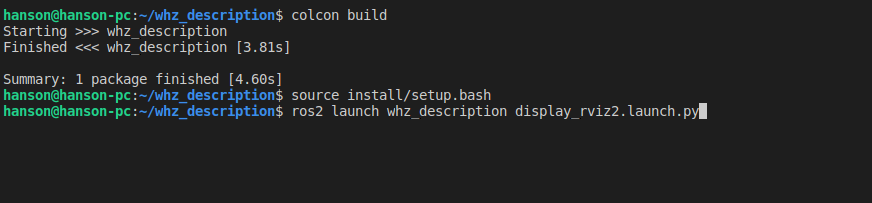
@小鱼 过程是新建了一个功能包,在其中创建了URDF,launch,修改了setup.py,之后编译运行ros2 launch whz_description display_rviz2.launch.py在rviz2上添加robotmodel模块,修改了link名称,最后显示不出模型。

-
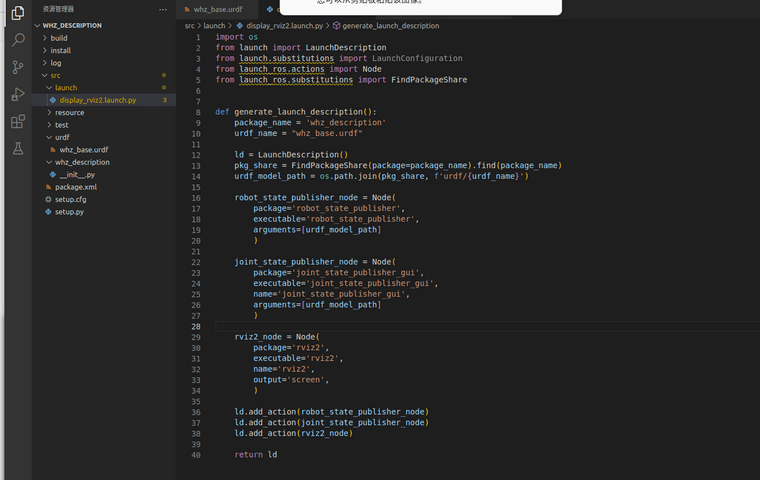
@阿政在路上 你的代码结构是不是有问题,感觉层级看起来不对劲
-
@小鱼 我是新入门的菜鸟
 ,可能有些文件建立的不正确,您觉得哪里有问题,我没有看出来,还望指导一下
,可能有些文件建立的不正确,您觉得哪里有问题,我没有看出来,还望指导一下
-
@阿政在路上 src下应该是包名,launch、urdf文件夹应该是在功能包下的
-
@小鱼 哦豁,原来是这样,我改一下
-
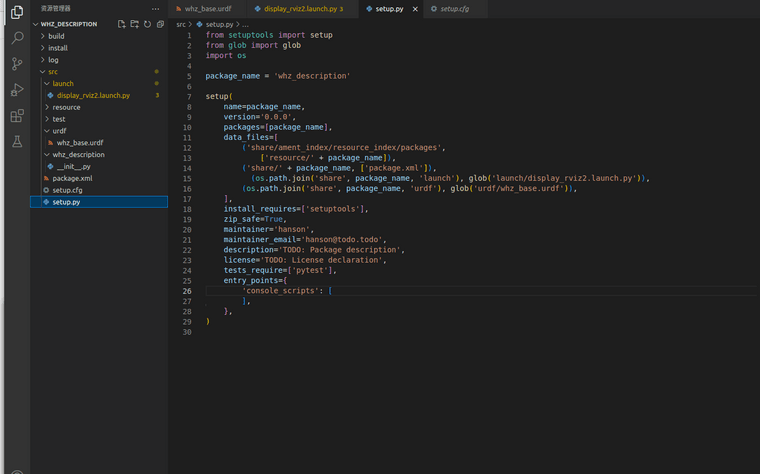
@小鱼 是这样的吗,我是不是理解错了
-
@阿政在路上 你去对比下我的代码,对着看就行,细心些,低级错误
-
@小鱼嗯嗯,好的,谢谢啦。 那现在这个文件层次是正确的吧
-
@阿政在路上 不对的,你对着正确的对比下,这个一眼就能看出来的。
-
@小鱼 嗯嗯,好的,我再重新弄一下,十分感谢
-
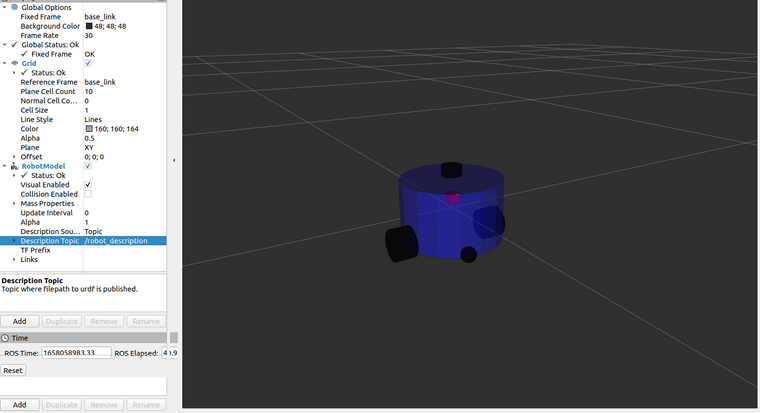
@小鱼 弄出来啦,确实是没注意细节,积累教训了,哈哈,十分谢谢大佬
-
 小 小鱼 从 中的 社区&开源 移动了该主题
小 小鱼 从 中的 社区&开源 移动了该主题