opencv 如何用c++实现像素坐标转相机坐标
-
我想请问一下,如果我想将像素坐标系,u,v转成相机坐标系用这个函数cv::undistortPoints c++实现的话参数是什么类型的?我看的官方文档畸变系数和参数矩阵,坐标输入都是inputArray,然后我用的是std::vector作为实参传进去的,如果想接收的话应该用什么参数类型去接收?
-
@小元不圆 hi,可以看一下别人怎么用的
void triangulate_stereo(const cv::Mat & K1, const cv::Mat & kc1, const cv::Mat & K2, const cv::Mat & kc2, const cv::Mat & Rt, const cv::Mat & T, const cv::Point2d & p1, const cv::Point2d & p2, cv::Point3d & p3d, double * distance) { //to image camera coordinates cv::Mat inp1(1, 1, CV_64FC2), inp2(1, 1, CV_64FC2); inp1.at<cv::Vec2d>(0, 0) = cv::Vec2d(p1.x, p1.y); inp2.at<cv::Vec2d>(0, 0) = cv::Vec2d(p2.x, p2.y); cv::Mat outp1, outp2; cv::undistortPoints(inp1, outp1, K1, kc1); cv::undistortPoints(inp2, outp2, K2, kc2); assert(outp1.type()==CV_64FC2 && outp1.rows==1 && outp1.cols==1); assert(outp2.type()==CV_64FC2 && outp2.rows==1 && outp2.cols==1); const cv::Vec2d & outvec1 = outp1.at<cv::Vec2d>(0,0); const cv::Vec2d & outvec2 = outp2.at<cv::Vec2d>(0,0); cv::Point3d u1(outvec1[0], outvec1[1], 1.0); cv::Point3d u2(outvec2[0], outvec2[1], 1.0); //to world coordinates cv::Point3d w1 = u1; cv::Point3d w2 = cv::Point3d(cv::Mat(Rt*(cv::Mat(u2) - T))); //world rays cv::Point3d v1 = w1; cv::Point3d v2 = cv::Point3d(cv::Mat(Rt*cv::Mat(u2))); //compute ray-ray approximate intersection p3d = approximate_ray_intersection(v1, w1, v2, w2, distance); } -
@小鱼 我想请问下,terminate called after throwing an instance of 'cv::Exception'
what(): OpenCV(4.2.0) ../modules/core/src/matrix_wrap.cpp:79: error: (-215:Assertion failed) 0 <= i && i < (int)vv.size() in function 'getMat_'
我编译通过但是运行报错,这大概是什么原因
#include "ros/ros.h"
#include "tf2_ros/transform_broadcaster.h"
#include "tf2/LinearMath/Quaternion.h"
#include "tf/transform_listener.h"
#include "std_msgs/Float32MultiArray.h"
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
vector<vector<double>> MK;
vector<double> MD;void pixel_to_camera(double arr[],float depth){
vector<double> points(arr,arr+2);
vector<Point2f> MP;
cv::undistortPoints(points,MP,MK,MD,cv::noArray(),cv::noArray());
int main(int argc,char *argv[]){
ros::init(argc,argv,"tf_pub_dynamic");
ros::NodeHandle nh;
double c1[3] = {467.973718746897, 0, 303.2622606570868};
double c2[3] = {0, 452.261907941113, 251.781457549611};
double c3[3] = {0, 0, 1};
vector<double> c1_v(c1,c1+3);
vector<double> c2_v(c2,c2+3);
vector<double> c3_v(c3,c3+3);
MK.push_back(c1_v);
MK.push_back(c2_v);
MK.push_back(c3_v);double d1[5]={0.1162199830512324, -0.1111997240485036, -0.007053489238768723, 0.006914931854427629, 0}; for(int i = 0;i<5;i++){ MD.push_back(d1[i]); } double arr[2] = {286.0,198.0}; int *result; pixel_to_camera(arr,1.0); return 0;}
-
@小元不圆 我用的是std::vector来作为矩阵的不知道可不可以这么写
-
@小元不圆 应该是数据被opencv拿到时是空的,你没有赋值成功。
-
@小鱼 鱼哥,我按照你给的例子把参数类型全部换成了mat类型可是还是报错了,不过报错变了
terminate called after throwing an instance of 'cv::Exception'
what(): OpenCV(4.2.0) ../modules/calib3d/src/undistort.dispatch.cpp:283: error: (-215:Assertion failed) CV_IS_MAT(_cameraMatrix) && _cameraMatrix->rows == 3 && _cameraMatrix->cols == 3 in function 'cvUndistortPointsInternal'Aborted (core dumped)
#include "ros/ros.h"
#include "tf2_ros/transform_broadcaster.h"
#include "tf2/LinearMath/Quaternion.h"
#include "tf/transform_listener.h"
#include "std_msgs/Float32MultiArray.h"
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;double num1[3][5] = {{467.973718746897, 0, 303.2622606570868},
{0, 452.261907941113, 251.781457549611},
{0,0,1},
};
double num2[5] = {0.1162199830512324, -0.1111997240485036,
-0.007053489238768723, 0.006914931854427629, 0};
void pixel_to_camera(double arr[],float depth){
vector<double> points(arr,arr+2);
vector<Point2f> MP;cv::Mat inp1(1, 1, CV_64FC2,arr), inp2(1, 1, CV_64FC2); cv::Mat outp1, outp2; cv::Mat m1(3,5,CV_64F,num1); cv::Mat m2(1,5,CV_64F,num2); cv::undistortPoints(inp1,outp1,m1,m2);int main(int argc,char *argv[]){
ros::init(argc,argv,"tf_pub_dynamic");
ros::NodeHandle nh;double arr[2] = {286.0,198.0}; int *result; pixel_to_camera(arr,1.0); return 0;}
-
./modules/calib3d/src/undistort.dispatch.cpp:283: error: (-215:Assertion failed) CV_IS_MAT(_cameraMatrix) && _cameraMatrix->rows == 3 && _cameraMatrix->cols == 3
这个矩阵至少是3*3的哈
-
@小鱼 嗯嗯 我输入参数输错了,但是我获得的结构是nan是为什么呀
-
@小元不圆 nan是计算中除0了应该是,所以还是输入数据的问题,仔细检查。
-
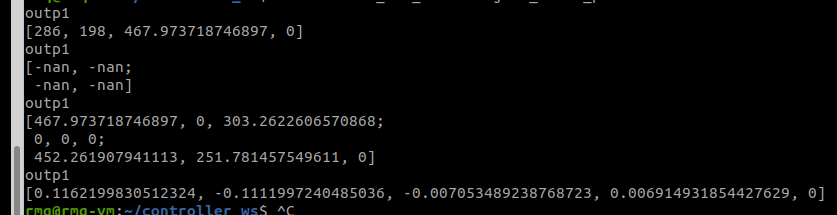
@小元不圆
这是我的代码,我把输入和输出全部打印出来后,得到的果全是nan。
#include "ros/ros.h"
#include "tf2_ros/transform_broadcaster.h"
#include "tf2/LinearMath/Quaternion.h"
#include "tf/transform_listener.h"
#include "std_msgs/Float32MultiArray.h"
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
vector<vector<double>> MK;
vector<double> MD;
double num1[3][5] = {{467.973718746897, 0, 303.2622606570868},
{0, 452.261907941113, 251.781457549611},
{0,0,1},
};
double num2[5] = {0.1162199830512324, -0.1111997240485036,
-0.007053489238768723, 0.006914931854427629, 0};void pixel_to_camera(double arr[],float depth){
vector<double> points(arr,arr+2);
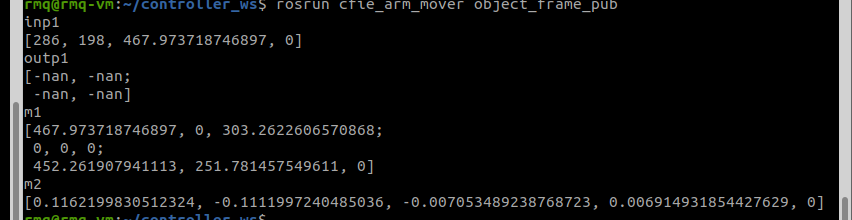
vector<Point2f> MP;cv::Mat inp1(1, 2, CV_64FC2,arr), inp2(1, 1, CV_64FC2); cv::Mat outp1, outp2; cv::Mat m1(3,3,CV_64F,num1); cv::Mat m2(1,5,CV_64F,num2); cv::undistortPoints(inp1,outp1,m1,m2); cout<<"inp1\n"<<inp1<<endl; cout<<"outp1\n"<<outp1<<endl; cout<<"m1\n"<<m1<<endl; cout<<"m2\n"<<m2<<endl;int main(int argc,char *argv[]){
ros::init(argc,argv,"tf_pub_dynamic");
ros::NodeHandle nh;
double arr[2] = {286.0,198.0};
int *result;
pixel_to_camera(arr,1.0);
return 0;
}
-
 ,格式没弄整齐
,格式没弄整齐 -
@小鱼 是我输入的值不对,我检查一下,谢了鱼鱼哥
-
@小元不圆 m1第二行全是0,你发现了吗
-
@小鱼 嗯嗯,解决掉了,谢啦,顺便问一下输入的像素坐标是顺序是x和y,输出的相机下的坐标顺序分别也是x和y对吗
-
@小元不圆 像素坐标和相机坐标原点和方向是不同的,具体我记不太清了,你找些文章看看,记得把问题标记为已解决,同时改一下标题,这个标题不太合格
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
1.使用明确的问题标题
好的标题:一键安装后 进不去图形操作系统(能让人一眼看出问题)
不好的标题(看到后感觉莫名其妙不想回答):
ssh远程登录(远程登录怎么了?)
ROS安装错误(不说什么错误) -
@小鱼 好嘞,改了
-
小 小元不圆 将这个主题标记为已解决,在