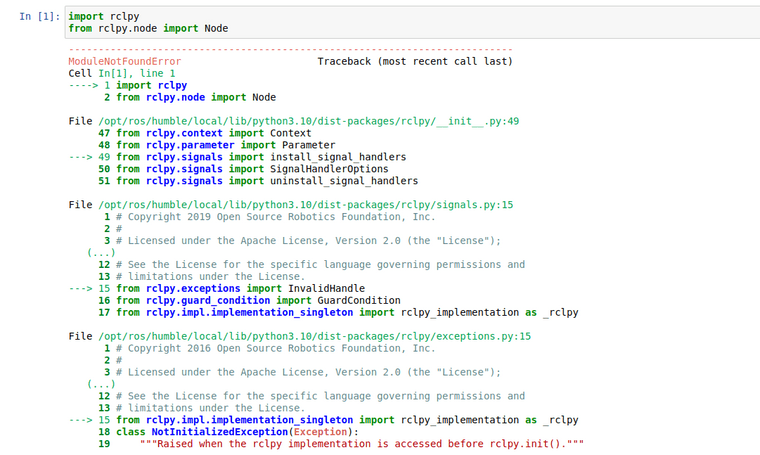
jupyter新建python3文件终端报错,导入rclpy报错
-
@一只活跃的新手 这是我的错,你输入python --version检查下你的miniconda中python的版本,如果没猜错应该不是3.10,ros2用的版本是3.10的python,两者有一些差异。
如果可以证实,你可以通过下面这句话关闭miniconda
conda config --set auto_activate_base false -
@一只活跃的新手 机器人学部分用了foxy部分的教程,个别操作没有更新.
-
@小鱼 ok,多谢鱼哥啦,我去装插件试一试
-
一 一只活跃的新手 将这个主题标记为已解决,在
-
@小鱼 鱼哥你好,我也是跟着动手学机器人学的,我也是遇到了无法import rclpy的问题,但我自己创建了一个conda python3.10的虚拟环境,但是也不行,您觉得还能用啥操作修复一下吗,还是说像您建议那样在vscode上学?
-
此回复已被删除! -
@小鱼 这是我的报错
ImportError: /home/sue/miniconda3/envs/sjr/bin/../lib/libstdc++.so.6: version `GLIBCXX_3.4.30' not found (required by /opt/ros/humble/local/lib/python3.10/dist-packages/rclpy/_rclpy_pybind11.cpython-310-x86_64-linux-gnu.so)
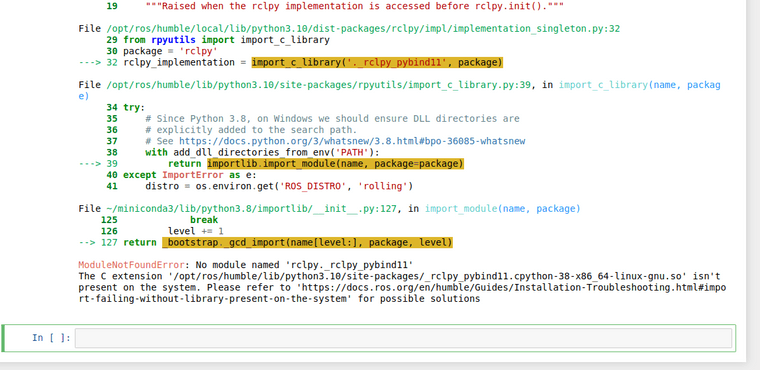
The C extension '/opt/ros/humble/local/lib/python3.10/dist-packages/rclpy/_rclpy_pybind11.cpython-310-x86_64-linux-gnu.so' failed to be imported while being present on the system. Please refer to 'https://docs.ros.org/en/{distro}/Guides/Installation-Troubleshooting.html#import-failing-even-with-library-present-on-the-system' for possible solutions -
@Sue 建议vscode
-
这是我的报错 -
@小鱼 在 jupyter新建python3文件终端报错,导入rclpy报错 中说:
不好意思,我貌似忽略了什么,请告诉我你的系统版本,ROS2版本,以及你看的教程,我猜因为教程是foxy版本造成的版本差异.
如果你是在学习动手学机器人学,我推荐的解决方案是卸载conda,接着直接在vscode里安装jupyter插件,就可以愉快的在vscode里继续学习了. -
@小鱼 您好,我和上面33519928558那位博主的报错问题一模一样,
ubuntu版本:Ubuntu 22.04.1 LTS
ROS2版本:humble
学习的网站:https://fishros.com/d2lros2/#/humble/
请问鱼哥,我也是卸载miniconda,在vscode里面安装jupyter插件么? -
@2424102004 对的
-
@小鱼 好的,感谢鱼哥
-
import rclpy的时候出现 "libstdc++.so.6: version `GLIBCXX_3.4.30' not found"
可以在base环境中试一下 conda install -c conda-forge gcc=12.1.0
亲测有效

-
@554553422 确实,刚问了bing也这么回复的
-
 小 小鱼 在 中 引用了 这个主题
小 小鱼 在 中 引用了 这个主题
-
@554553422 真的有用感谢大佬
-
怎么在vscode中安装juypter?
-
@554553422 遇到 "libstdc++.so.6: version `GLIBCXX_3.4.30' not found"这个问题而且conda install -c conda-forge gcc=12.1.0也没用的话可以参考这个文章https://blog.csdn.net/bohrium/article/details/126546521
重新建立一个软连接试一下,我是这么解决的。 -
小 小鱼 在 中 引用了 这个主题
-
@2929520979 为何我一直卡在了Collecting package metadata (current_repodata.json):是需要更换镜像源吗
-
-
H haojiezhanshi1999 在 中 引用了 这个主题