moveit+gazebo联合仿真,gazebo中的机械臂不跟着moveit中的联动
-
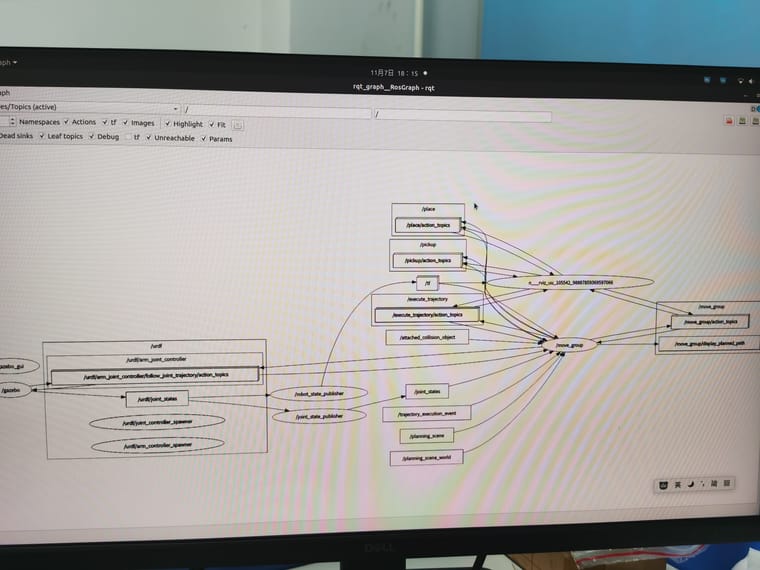

rqt的图在右边,控制器插件感觉都配置好了,具体什么地方有问题不清楚,请大佬指点
-
-
@小鱼 我ros用了melodic跟noetic都试过,是同样的问题!
-
@小鱼 ubuntu18.04 跟 ubuntu20.04
-
@2308607900 仔细看了下,没啥看出啥问题,gazebo里的模型和rviz里的姿态是一致的,而且状态都是Executed,表示已经执行了,应该不存在不执行的问题。
-
@小鱼 谢谢小鱼我再仔细研究一下
-
@2308607900 我之前也遇到过类似的问题,你在config中写一个controller.yaml文件试试
-
@霜丶川 问题是urdf文件没配置好,问题已经解决!
-
@2308607900 亲,我也遇到了相似的问题,在rviz里能动,但是到了gzebo里报错。
报错内容:
[ERROR] [1669167751.277877941, 37.752000000]: Unable to identify any set of controllers that can actuate the specified joints: [ joint_1 joint_2 joint_3 joint_4 ]
[ERROR] [1669167751.277897873, 37.752000000]: Known controllers and their joints:[ERROR] [1669167751.277925647, 37.752000000]: Apparently trajectory initialization failed
亲,知道我这个是怎么回事么,我在社区也提问了,有更详细的配置信息。
-
@1769564038 仔细看看你的urdf文件的joint跟你的controller写的能否对应上,希望对你有帮助!
-
unbuntu18.04 melodic 双系统
大佬,我也出现这个问题了。我是初学者,使用moveit配置了自己的机械臂之后,所有的moveit_config文件我都不敢动,然后直接运行:demo.launch和gazebo.launch之后。我的不报错,在rviz和gazebo中可以正常显示,但是planning,以及execute之后,gazebo不动。终端只有警告说[ WARN] [1679115031.894114016]: Shutdown request received.
[ WARN] [1679115031.898257196]: Reason given for shutdown: [[/robot_state_publisher] Reason: new node registered with same name]重名了,但是我也不知道它节点具体在哪个包重名了,改都不知道去哪里改。你在跑的时候遇见过吗?四天了,来来回回重新配置了许多次,求帮忙看看。谢谢
-
此回复已被删除! -
此回复已被删除! -
@1113618930 [ WARN] [1679115440.455739215, 770.246000000]: Shutdown request received.
[ WARN] [1679115440.458231438, 770.248000000]: Reason given for shutdown: [[/robot_state_publisher] Reason: new node registered with same name]
[WARN] [1679115440.666237, 770.446000]: Inbound TCP/IP connection failed: connection from sender terminated before handshake header received. 0 bytes were received. Please check sender for additional details.
[robot_state_publisher-2] process has finished cleanly
log file: /home/xp/.ros/log/55428a7c-c539-11ed-ac96-80fa5b4f16d1/robot_state_publisher-2*.log
[robot_state_publisher-2] restarting process
process[robot_state_publisher-2]: started with pid [21011] -
@2308607900 您好,想请问一下,返回给gazebo的那个action_topic是哪一步编写的呢?