[FishBot教程] 9.0.3. 主控板固件烧录与配置
-

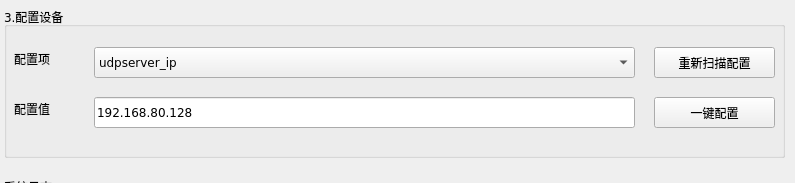

鱼哥鱼哥,请问为什么配置ip时用的也是命令出来的ip地址但下面的命令会报错呢 -
@小鱼 在 [FishBot教程] 3. 主控板固件烧录与配置 中说:
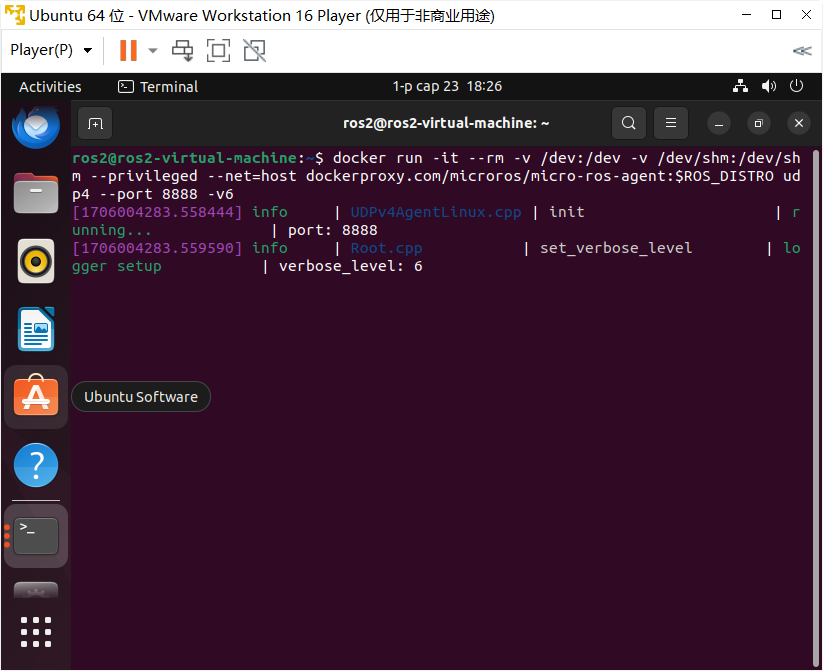
docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6
鱼哥你好!在终端中输入此指令时始终提示:
docker: invalid reference format.
See 'docker run --help'.
即使使用国内代理指令也始终报错同上。请问这种情况该如何解决呢? -
此回复已被删除! -
@378842370 已解决。将命令内$ROS_DISTRO部分替换为humble即可正常运行,网上查阅后可知遇到这种情况多是关于windows到linux粘贴文字格式的转换问题。
-

鱼哥你好,我看到上面有针对我这个错误的解决方法,就是换到版本20.04,但是我的同学们用的版本都是和我一样的22.04,但是大家都可以正常通信,请问这是什么原因呢 -
@2061593673 鱼哥,该问题已解决
-
@小鱼 小鱼哥,我想用主控的代码烧录进esp32里面,直接用您的官网驱动platformio就好了吗?和官网给的那些bin是一样的吗
-
@908050948 基本一样的
-
一开始是连不上显示 error 后面接网线连到电脑 之后再试一下不报错了 但是等半天 重启也没有通信 鱼哥这是什么原因?
-
@1147022743 就是网络没有通
-
@1923825015 请问怎么解决的?
-
@1147022743 你应该需要一些计算机网络基础知识,可以找客服要一个常见问题解答视频,有详细介绍。
-

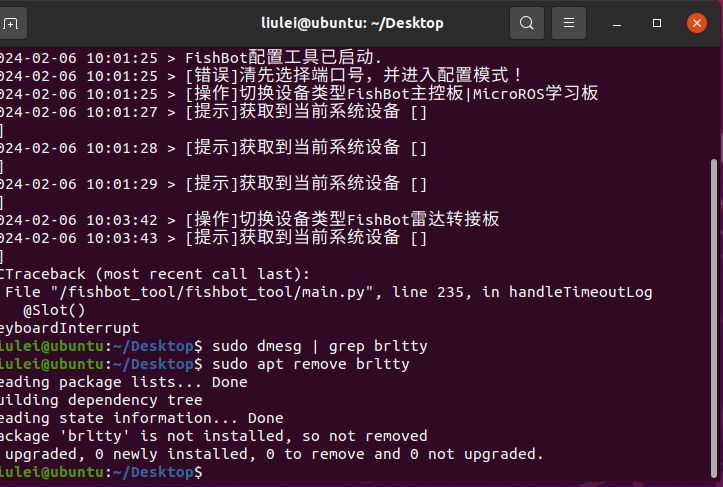
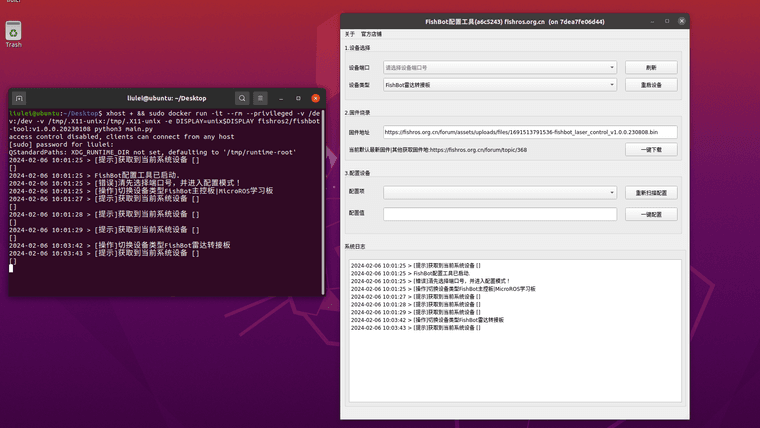
启动MicroROS,用国内代理指令也还是不行 -
问题:无法获得端口号(显示为空)
设备:雷达转接板
使用的是虚拟机 ubuntu 20.04版本
按照教程插拔过了,还是无法识别
-
-
@小鱼 鱼哥,麻烦看看
-
 ls /dev/ttyUSB0
ls /dev/ttyUSB0
还是没有用 -
@mixllred lsusb 看看,上下文说说
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。 -
@1467427631 我的问题和你一模一样,你的解决了吗?
-
@1467427631 这样的情况必须重装系统了吗。。。。。