[FishBot教程] 9.0.5. 雷达固件烧录及配置
-
@zcy 看一下雷达板上的数据显示,网络通不通,跳线帽对不对
-
@zcy 解决了吗
-
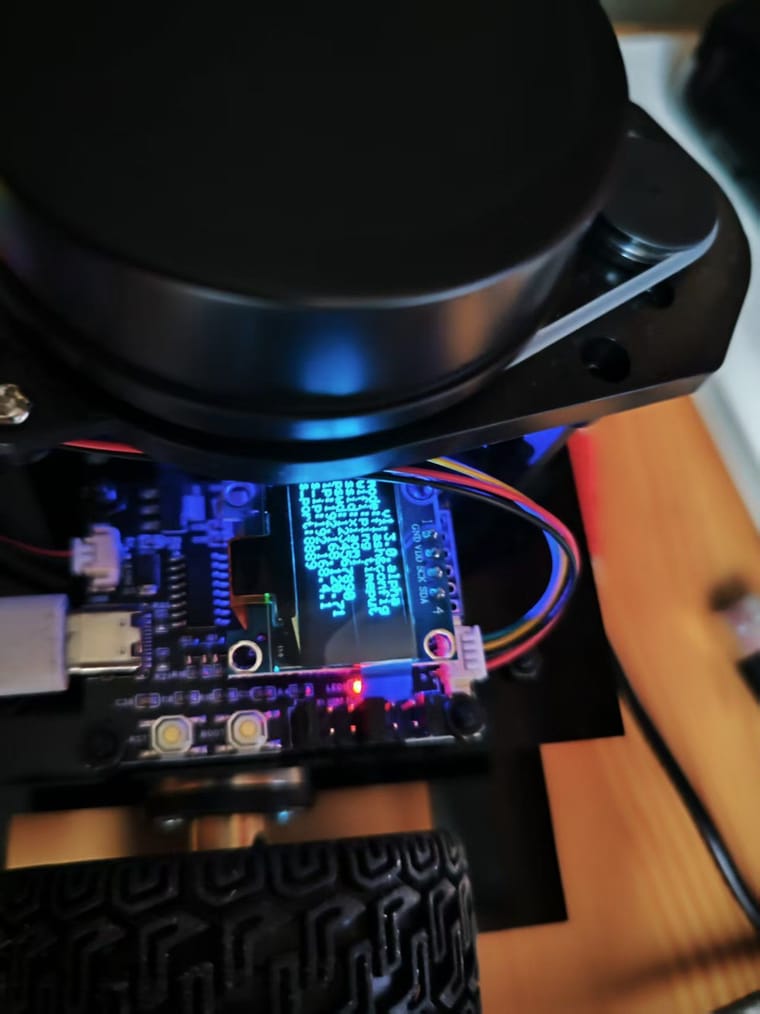
@小鱼 鱼哥,我进行雷达配置的时候,udpserver_ip已经配置完了,也能ping通,但是下边的s_ip不变,导致后边的操作无法进行,这是什么原因呢?
 file:///home/robot/Documents/xwechat_files/wxid_td6rzwdtg9tx22_f32b/temp/2025-06/RWTemp/9f8024fd3f7c74432bd91802c4ad394a.jpg
file:///home/robot/Documents/xwechat_files/wxid_td6rzwdtg9tx22_f32b/temp/2025-06/RWTemp/9f8024fd3f7c74432bd91802c4ad394a.jpg -
@553416962 鱼哥,我用的手机热点,不知道影响不。 主控板配置配置的时候,我也用的热点,没有问题,可以实现键盘控制
-
@2495630402 换个热点就好啦
-
@ccccc 怎么解决的,我的是装的系统,跳线也是对的
-
@小鱼 小鱼您好,为什么
-
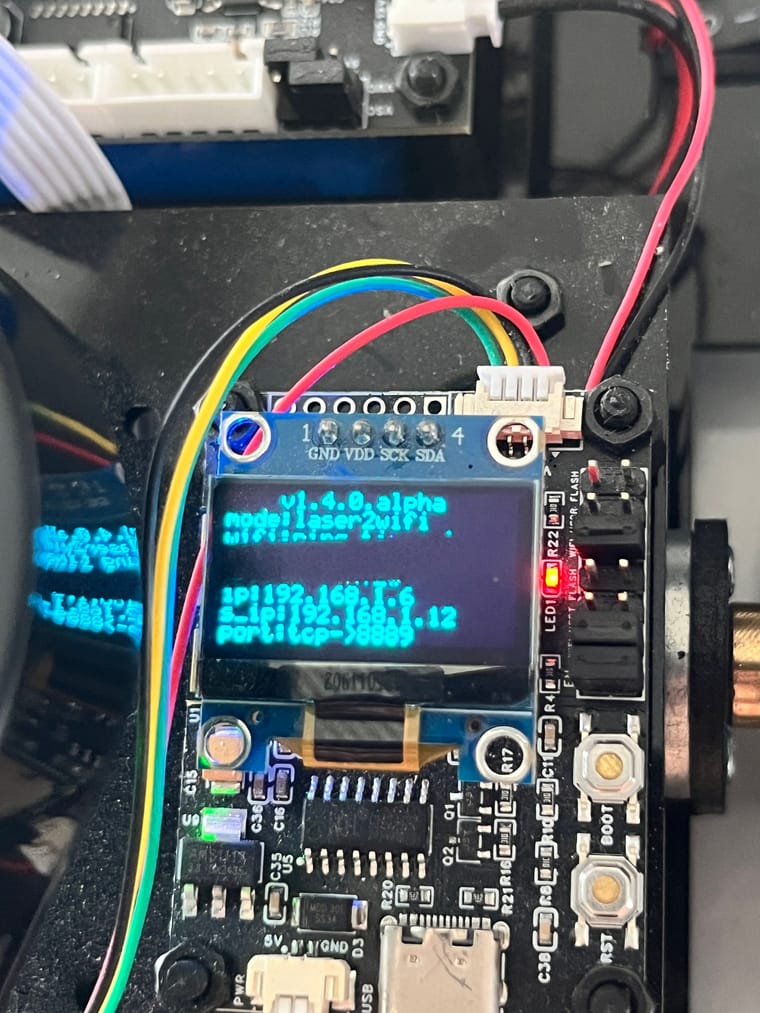
@小鱼 小鱼您好,为什么我的PORT是 PORT:tcp-8889呀,然后雷达驱动测试时显示TCP端口是8888.
 file:///home/zmy/文档/xwechat_files/wxid_tpb3or8y3jxo22_a70e/temp/2025-07/RWTemp/d8e758e2acdaf5e8b5ce1bdf2414beae.jpg
file:///home/zmy/文档/xwechat_files/wxid_tpb3or8y3jxo22_a70e/temp/2025-07/RWTemp/d8e758e2acdaf5e8b5ce1bdf2414beae.jpg
 file:///home/zmy/文档/xwechat_files/wxid_tpb3or8y3jxo22_a70e/temp/2025-07/RWTemp/26a4d9e57072e180927cb0673ef8117b.jpg
file:///home/zmy/文档/xwechat_files/wxid_tpb3or8y3jxo22_a70e/temp/2025-07/RWTemp/26a4d9e57072e180927cb0673ef8117b.jpg
一直连接不上,nc -l 8889 可以收到数据。
@小鱼 -
@862524030 请贴出使用的命令
-
@小鱼 ~$ xhost + && sudo docker run -it --rm -p 8889:8889 -p 8889:8889/udp -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser
access control disabled, clients can connect from any host
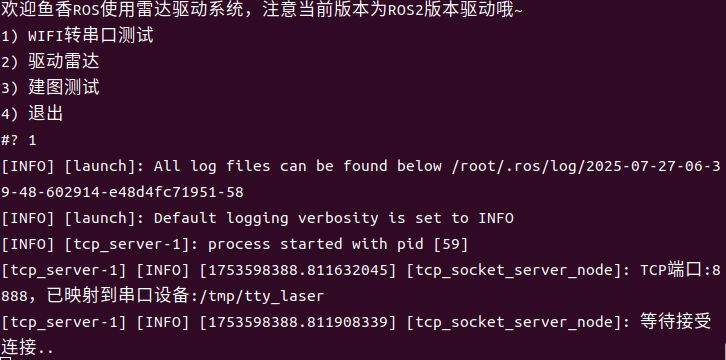
欢迎鱼香ROS使用雷达驱动系统,注意当前版本为ROS2版本驱动哦~- WIFI转串口测试
- 驱动雷达
- 建图测试
- 退出
#? 1
[INFO] [launch]: All log files can be found below /root/.ros/log/2025-07-30-16-19-12-964512-0279608df313-58
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [tcp_server-1]: process started with pid [59]
[tcp_server-1] [INFO] [1753892353.208186223] [tcp_socket_server_node]: TCP端口:8888,已映射到串口设备:/tmp/tty_laser
[tcp_server-1] [INFO] [1753892353.208416185] [tcp_socket_server_node]: 等待接受连接..