jetson NX noetic + cartographer + move_base + DWA导航 局部路径规划失败的问题
-
1. 背景和现象:
环境如标题,在rviz上给了导航目标点后,无法规划出局部路径,机器人不会动,全局路径规划成功。
全局路径规划算法是:global_planner/GlobalPlanner
局部路径规划算法是:dwa_local_planner/DWAPlannerROS是两轮差速机器人。
2. 错误信息如下:
[ INFO] [1674898445.786465522]: Got new plan
[ERROR] [1674898445.786967621]: Extrapolation Error: Lookup would require extrapolation 0.002850344s into the future. Requested time 1674898445.696245432 but the latest data is at time 1674898445.693394899, when looking up transform from frame [odom] to frame [map][ERROR] [1674898445.787083433]: Global Frame: odom Plan Frame size 42: map
[ WARN] [1674898445.787182925]: Could not transform the global plan to the frame of the controller
[ERROR] [1674898445.787257456]: Could not get local plan
[ INFO] [1674898445.794323830]: =============> tmp_xyz_vel_str: tmpX=0, tmpZ=0 (速度为0,不会动)
[ INFO] [1674898445.795152821]: =================> xyz_vel_str: x=0, z=0 -
@JerryloveEmily 在 jetson NX noetic + cartographer + move_base + DWA导航 局部路径规划失败的问题 中说:
Could not transform the global plan to the frame of the controller
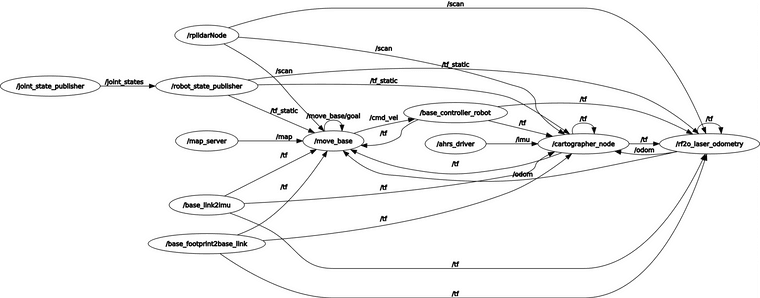
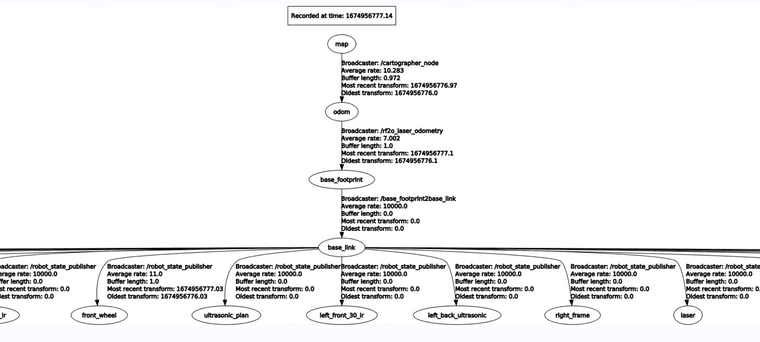
贴一下tf和rqtgrapher
-
-
@JerryloveEmily 真机是吧,carto是运行在jeston上还是上位机,注意这里的时间差
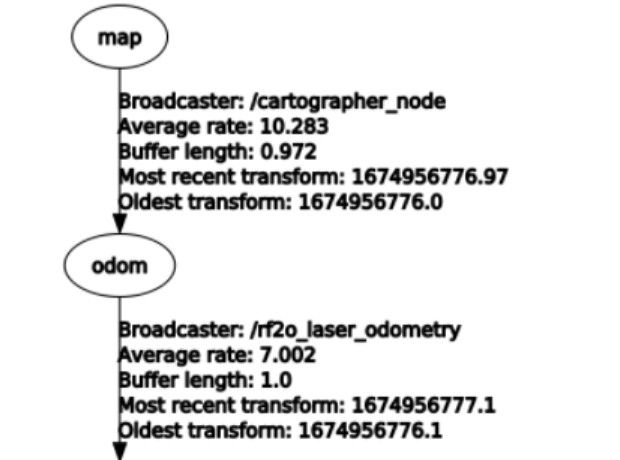
map->odom 1674956776.97
odom->base 6777.1尝试提高odom的频率试试~
-
@小鱼 对的 carto运行在jetson上,我pc虚拟机,只是ssh到jetson,和使用rviz可视化而已。
您的意思是提高odom的发布频率吗,odom我是用rf2o_laser_odometry来发布的,不是轮式里程计。 -
@JerryloveEmily 可以修改下源码吗,手动提高速率,可以插值。或者修改下参数,ros1我不太清楚,不过move_base下应该有