[FishBot教程] 9.0.6. 雷达驱动及建图测试
-
@mixllred
) 驱动雷达
2) 建图测试
3) 退出
#? 1
UART2SOCKET:8888->/tmp/fishbot_laser
Prepare to Accept connect!
3 <socket.socket fd=6, family=AddressFamily.AF_INET, type=SocketKind.SOCK_STREAM, proto=0, laddr=('172.17.0.2', 8888), raddr=('192.168.43.165', 62416)> 4
PTY: Opened /dev/pts/1 for 0.0.0.0:8888
[YDLIDAR INFO] Current ROS Driver Version: 1.4.5
[YDLIDAR]:SDK Version: 1.4.5
[YDLIDAR]:Lidar running correctly ! The health status: good
[YDLIDAR] Connection established in [/tmp/fishbot_laser][115200]:
Firmware version: 1.5
Hardware version: 1
Model: S4
Serial: 2020101300002268
[YDLIDAR]:Fixed Size: 360
[YDLIDAR]:Sample Rate: 3K
[YDLIDAR INFO] Current Sampling Rate : 3K
[YDLIDAR INFO] Now YDLIDAR is scanning ......
timout count: 1
[ERROR] [1713344387.186853131] [ydlidar_node]: Failed to get scan
timout count: 2
[ERROR] [1713344389.187233959] [ydlidar_node]: Failed to get scan
[ERROR] [1713344391.188039318] [ydlidar_node]: Failed to get scan
[ERROR] [1713344393.188949412] [ydlidar_node]: Failed to get scan
[ERROR] [1713344395.189370541] [ydlidar_node]: Failed to get scan
[ERROR] [1713344397.190185397] [ydlidar_node]: Failed to get scan
[ERROR] [1713344399.191660545] [ydlidar_node]: Failed to get scan
[ERROR] [1713344401.191919681] [ydlidar_node]: Failed to get scan
[ERROR] [1713344403.192957289] [ydlidar_node]: Failed to get scan
[ERROR] [1713344405.193506477] [ydlidar_node]: Failed to get scan
[ERROR] [1713344407.194619107] [ydlidar_node]: Failed to get scan
[ERROR] [1713344409.195089088] [ydlidar_node]: Failed to get scan
[ERROR] [1713344411.195370974] [ydlidar_node]: Failed to get scan
[ERROR] [1713344413.196157579] [ydlidar_node]: Failed to get scan -
@mixllred 请按照要求,单独发帖提问
-
-
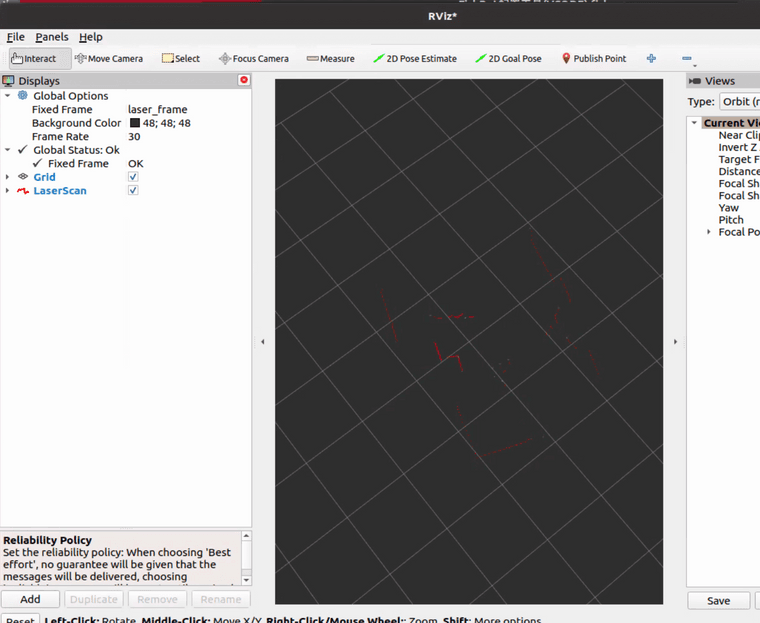
雷达建图不是很清晰,感觉很模糊,是啥问题,如何解决
-
针对第四步,点云数据已经有了,但是Crtl+C,然后输入2之后,并没有产生建图,我遗漏了哪些步骤吗?
-
@1006076811 在 [FishBot教程] 6. 雷达驱动及建图测试 中说:
针对第四步,点云数据已经有了,但是Crtl+C,然后输入2之后,并没有产生建图,我遗漏了哪些步骤吗?
我明白了,需要在rviz2里再添加一个map的监视
-
我这 确实没有 /scan 话题
-
可以正常启动,但是过了一会就会显示failed to get scan 跳帽也转成wifi模式了,请问怎么解决,topic list中也没有话题 -
@1141682555
有时候也有报错
“Failed to turn on the Lidar, because the lidar is blocked or the lidar hardware is faulty” -
@1141682555 这个一般是网络不稳定造成的,优化网络结构可以解决
-
@小鱼 我用的是手机热点,是因为热点不稳定造成的么?
-
@1141682555 资料和教程中应该有强调,不要用手机的
-
建图时会出现地图重叠的问题,而且laser_frame和base_link坐标系会脱离这是什么问题造成的啊
-
在执行
sudo xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser出现了下面的错误
No protocol specified xhost: unable to open display ":10.0"配置都正常,雷达也在运行状态,可以ping通
-
@2462331351 这个和显示相关,如果显示正常可以忽略
-
@小鱼 有这个镜像的DockerFile吗,我想要重新构建ARM平台的镜像可以给我一下吗
-
@2462331351 这个时间太久了,我自己都找不到了,不过你可以到dockerhub,那里能看到镜像的构建命令
-
无线驱动雷达,一开始可以
当我看到移动小车建图时,运行驱动这个雷达就又不行了
之后重启,单独运行无线驱动雷达就一直是旁边这个报错了 -
@1281857896 用我做好的docker镜像测试过没
-
@小鱼 用docker可以的