[FishBot教程] 9.0.6. 雷达驱动及建图测试
-
@2216096692 偶尔出一个timeout没事,能建图就说明数据没啥问题,另外驱动过后,需要开新的终端测试,看你的图好像退出后再用hz查看,但驱动已经退出了,肯定没有数据
-
保存地图出错
/opt/ros/humble/lib/nav2_map_server/map_saver_cli: symbol lookup error: /opt/ros/humble/lib/libmap_server_core.so: undefined symbol: _ZN9nav2_util13LifecycleNode18on_rcl_preshutdownEv
[ros2run]: Process exited with failure 127使用小鱼在B站分享的fishros2的fishbotU盘系统,而且我用一键安装指令重装了ROS2依旧报错。
-
@515261725 你有安装nav2吗,上下文操作有哪些?
-
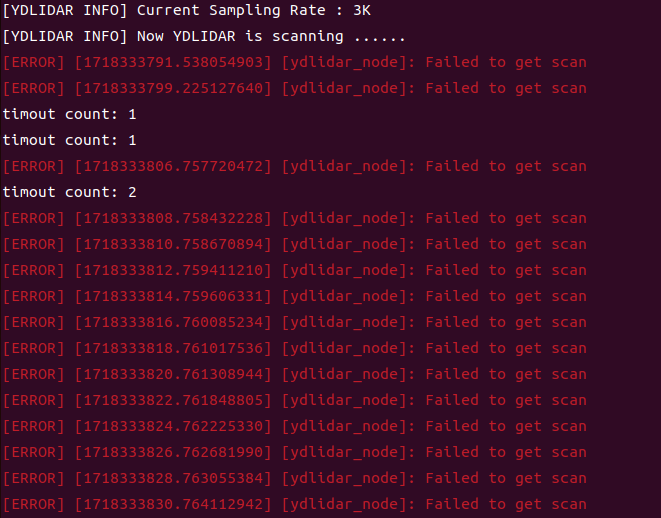
@小鱼 鱼哥,我也有这个问题,每次都扫描开始一会就会timeout,然后就ERROR了,地图扫描不完整
终端如下:
[INFO] [launch]: All log files can be found below /root/.ros/log/2024-04-16-12-06-30-681768-ec555413ec15-47
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [laser_x2-1]: process started with pid [48]
[INFO] [static_transform_publisher-2]: process started with pid [50]
[INFO] [cartographer_node-3]: process started with pid [52]
[INFO] [cartographer_occupancy_grid_node-4]: process started with pid [54]
[INFO] [rviz2-5]: process started with pid [56]
[static_transform_publisher-2] [WARN] [1713269191.318786549] []: Old-style arguments are deprecated; see --help for new-style arguments
[static_transform_publisher-2] [INFO] [1713269191.583721233] [static_tf_pub_laser]: Spinning until stopped - publishing transform
[static_transform_publisher-2] translation: ('0.000000', '0.000000', '0.000000')
[static_transform_publisher-2] rotation: ('0.000000', '0.000000', '0.000000', '1.000000')
[static_transform_publisher-2] from 'base_link' to 'laser_frame'
[cartographer_node-3] [INFO] [1713269191.671332461] [cartographer logger]: I0416 12:06:31.000000 52 configuration_file_resolver.cc:41] Found '/workspace/install/fishbot_laser_driver/share/fishbot_laser_driver/config/fishbot_laser_2d.lua' for 'fishbot_laser_2d.lua'.
[cartographer_node-3] [INFO] [1713269191.675178836] [cartographer logger]: I0416 12:06:31.000000 52 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/map_builder.lua' for 'map_builder.lua'.
[cartographer_node-3] [INFO] [1713269191.677415568] [cartographer logger]: I0416 12:06:31.000000 52 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/map_builder.lua' for 'map_builder.lua'.
[cartographer_node-3] [INFO] [1713269191.681007798] [cartographer logger]: I0416 12:06:31.000000 52 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/pose_graph.lua' for 'pose_graph.lua'.
[cartographer_node-3] [INFO] [1713269191.682020949] [cartographer logger]: I0416 12:06:31.000000 52 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/pose_graph.lua' for 'pose_graph.lua'.
[cartographer_node-3] [INFO] [1713269191.683193823] [cartographer logger]: I0416 12:06:31.000000 52 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder.lua' for 'trajectory_builder.lua'.
[cartographer_node-3] [INFO] [1713269191.684767187] [cartographer logger]: I0416 12:06:31.000000 52 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder.lua' for 'trajectory_builder.lua'.
[cartographer_node-3] [INFO] [1713269191.685998156] [cartographer logger]: I0416 12:06:31.000000 52 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder_2d.lua' for 'trajectory_builder_2d.lua'.
[cartographer_node-3] [INFO] [1713269191.686030258] [cartographer logger]: I0416 12:06:31.000000 52 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder_2d.lua' for 'trajectory_builder_2d.lua'.
[cartographer_node-3] [INFO] [1713269191.687939363] [cartographer logger]: I0416 12:06:31.000000 52 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder_3d.lua' for 'trajectory_builder_3d.lua'.
[cartographer_node-3] [INFO] [1713269191.687977251] [cartographer logger]: I0416 12:06:31.000000 52 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder_3d.lua' for 'trajectory_builder_3d.lua'.
[cartographer_node-3] [INFO] [1713269191.761594023] [cartographer logger]: I0416 12:06:31.000000 52 map_builder_bridge.cpp:136] Added trajectory with ID '0'.
[rviz2-5] QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-root'
[rviz2-5] [INFO] [1713269194.620629614] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-5] [INFO] [1713269194.621912638] [rviz2]: OpenGl version: 4.1 (GLSL 4.1)
[rviz2-5] [INFO] [1713269194.754669959] [rviz2]: Stereo is NOT SUPPORTED
[cartographer_node-3] [INFO] [1713269205.685849593] [cartographer logger]: I0416 12:06:45.000000 52 ordered_multi_queue.cc:172] All sensor data for trajectory 0 is available starting at '638488660056556545'.
[cartographer_node-3] [INFO] [1713269205.686133853] [cartographer logger]: I0416 12:06:45.000000 52 local_trajectory_builder_2d.cc:135] Extrapolator is still initializing.
[cartographer_node-3] [INFO] [1713269205.786017544] [cartographer logger]: I0416 12:06:45.000000 52 pose_graph_2d.cc:148] Inserted submap (0, 0).
[rviz2-5] [INFO] [1713269206.710351584] [rviz2]: Trying to create a map of size 157 x 75 using 1 swatches
[rviz2-5] [ERROR] [1713269206.742586494] [rviz2]: Vertex Program:rviz/glsl120/indexed_8bit_image.vert Fragment Program:rviz/glsl120/indexed_8bit_image.frag GLSL link result :
[rviz2-5] active samplers with a different type refer to the same texture image unit
[cartographer_node-3] [INFO] [1713269207.336078908] [cartographer logger]: I0416 12:06:47.000000 52 collated_trajectory_builder.cc:81] scan rate: 1.20 Hz 8.36e-01 s +/- 9.58e-01 s (pulsed at 101.84% real time)
[rviz2-5] [ERROR] [1713269207.352292656] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713269207.326929 but the latest data is at time 1713269207.325720, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713269209.109143317] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713269209.211466 but the latest data is at time 1713269209.211132, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713269209.334953712] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713269209.469465 but the latest data is at time 1713269209.340465, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713269209.461521477] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713269209.598465 but the latest data is at time 1713269209.598465, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713269209.590836696] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713269209.727465 but the latest data is at time 1713269209.680132, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713269209.749655316] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713269209.835842 but the latest data is at time 1713269209.835508, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713269209.877724903] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713269209.965175 but the latest data is at time 1713269209.965175, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [INFO] [1713269210.711138962] [rviz2]: Trying to create a map of size 158 x 76 using 1 swatches
[rviz2-5] [ERROR] [1713269211.638195663] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713269211.651583 but the latest data is at time 1713269211.651250, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713269211.768248920] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713269211.879476 but the latest data is at time 1713269211.879142, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713269212.953693786] [rviz2]: Lookup would require extrapolation into the past. Requested time 1079831768.051021 but the earliest data is at time 1713269205.814118, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713269213.045640846] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713269213.160907 but the latest data is at time 1713269213.160573, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713269213.173373009] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713269213.289907 but the latest data is at time 1713269213.289907, when looking up transform from frame [laser_frame] to frame [map]
[cartographer_node-3] [WARN] [1713269213.282777994] [cartographer logger]: W0416 12:06:53.000000 52 range_data_collator.cc:82] Dropped 1 earlier points.
[rviz2-5] [ERROR] [1713269213.302591756] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713269213.418573 but the latest data is at time 1713269213.418240, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713269213.493703933] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713269213.547573 but the latest data is at time 1713269213.547573, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713269215.221313290] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713269215.256422 but the latest data is at time 1713269215.256088, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713269215.414464657] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713269215.465421 but the latest data is at time 1713269215.465421, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [INFO] [1713269215.533682452] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1713269205.526 for reason 'the timestamp on the message is earlier than all the data in the transform cache'
[rviz2-5] [ERROR] [1713269215.542120629] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713269215.594754 but the latest data is at time 1713269215.550088, when looking up transform from frame [laser_frame] to frame [map] -
@mixllred 检查下网络结构
-
@小鱼 鱼哥,我是用电脑开的热点,虚拟机用的是桥接模式
-
@小鱼
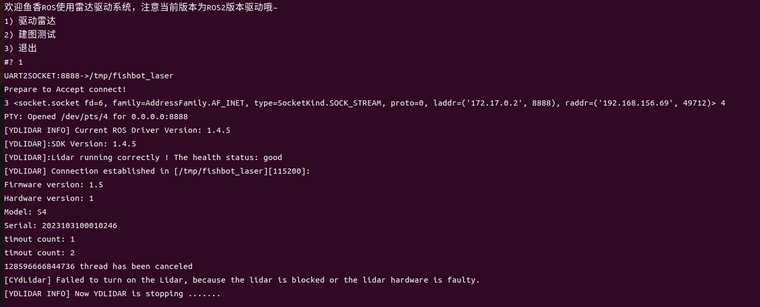
#? 1
UART2SOCKET:8888->/tmp/fishbot_laser
Prepare to Accept connect!
3 <socket.socket fd=6, family=AddressFamily.AF_INET, type=SocketKind.SOCK_STREAM, proto=0, laddr=('172.17.0.2', 8888), raddr=('192.168.43.165', 62715)> 4
PTY: Opened /dev/pts/2 for 0.0.0.0:8888
[YDLIDAR INFO] Current ROS Driver Version: 1.4.5
[YDLIDAR]:SDK Version: 1.4.5
[YDLIDAR]:Lidar running correctly ! The health status: good
[YDLIDAR] Connection established in [/tmp/fishbot_laser][115200]:
Firmware version: 1.5
Hardware version: 1
Model: S4
Serial: 2020101300002268
[YDLIDAR]:Fixed Size: 390
[YDLIDAR]:Sample Rate: 4K
[YDLIDAR INFO] Current Sampling Rate : 4K
[YDLIDAR INFO] Now YDLIDAR is scanning ......
timout count: 1
[ERROR] [1713320114.687064868] [ydlidar_node]: Failed to get scan
timout count: 2
[ERROR] [1713320116.687741811] [ydlidar_node]: Failed to get scan
[ERROR] [1713320118.689269687] [ydlidar_node]: Failed to get scan
[ERROR] [1713320120.691270177] [ydlidar_node]: Failed to get scan
[ERROR] [1713320122.691578106] [ydlidar_node]: Failed to get scan
[ERROR] [1713320124.692916798] [ydlidar_node]: Failed to get scan
[ERROR] [1713320126.693436285] [ydlidar_node]: Failed to get scan
[ERROR] [1713320128.694099668] [ydlidar_node]: Failed to get scan
[ERROR] [1713320130.695395445] [ydlidar_node]: Failed to get scan
[ERROR] [1713320132.695617436] [ydlidar_node]: Failed to get scan
[ERROR] [1713320134.696474381] [ydlidar_node]: Failed to get scan
[ERROR] [1713320136.697445108] [ydlidar_node]: Failed to get scan
[ERROR] [1713320138.698319895] [ydlidar_node]: Failed to get scan
^C[INFO] [1713320140.087169237] [rclcpp]: signal_handler(signum=2)
Traceback (most recent call last):
File "/workspace/install/fishbot_laser_driver/lib/fishbot_laser_driver/laser_x2", line 33, in <module>
sys.exit(load_entry_point('fishbot-laser-driver==0.0.0', 'console_scripts', 'laser_x2')())
File "/workspace/install/fishbot_laser_driver/lib/python3.10/site-packages/fishbot_laser_driver/fishbot_laser_x2.py", line 83, in main
SocketServer()
File "/workspace/install/fishbot_laser_driver/lib/python3.10/site-packages/fishbot_laser_driver/fishbot_laser_x2.py", line 35, in init
self.main()
File "/workspace/install/fishbot_laser_driver/lib/python3.10/site-packages/fishbot_laser_driver/fishbot_laser_x2.py", line 61, in main
fdlist = mypoll.poll(256)
KeyboardInterrupt
[ros2run]: Interrupt -
@mixllred
建图前雷达连接正常,开始建图后雷达转接板指示灯一闪一闪,出现以上报错,出现基本地图图像后建图停止,一个坐标轴开始偏离起始点(雷达没有移动)
-
@mixllred 在 [FishBot教程] 6. 雷达驱动及建图测试 中说:
@mixllred
建图前雷达连接正常,开始建图后雷达转接板指示灯一闪一闪,出现以上报错,出现基本地图图像后建图停止,一个坐标轴开始偏离起始点(雷达没有移动)
-
@mixllred 在 [FishBot教程] 6. 雷达驱动及建图测试 中说:
@mixllred 在 [FishBot教程] 6. 雷达驱动及建图测试 中说:
@mixllred
建图前雷达连接正常,开始建图后雷达转接板指示灯一闪一闪,出现以上报错,出现基本地图图像后建图停止,一个坐标轴开始偏离起始点(雷达没有移动)
- 驱动雷达
- 建图测试
- 退出
#? 2
[INFO] [launch]: All log files can be found below /root/.ros/log/2024-04-17-03-09-33-024637-0e0b6e597728-48
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [laser_x2-1]: process started with pid [49]
[INFO] [static_transform_publisher-2]: process started with pid [51]
[INFO] [cartographer_node-3]: process started with pid [53]
[INFO] [cartographer_occupancy_grid_node-4]: process started with pid [55]
[INFO] [rviz2-5]: process started with pid [57]
[static_transform_publisher-2] [WARN] [1713323373.381805889] []: Old-style arguments are deprecated; see --help for new-style arguments
[static_transform_publisher-2] [INFO] [1713323373.453802981] [static_tf_pub_laser]: Spinning until stopped - publishing transform
[static_transform_publisher-2] translation: ('0.000000', '0.000000', '0.000000')
[static_transform_publisher-2] rotation: ('0.000000', '0.000000', '0.000000', '1.000000')
[static_transform_publisher-2] from 'base_link' to 'laser_frame'
[cartographer_node-3] [INFO] [1713323373.468241251] [cartographer logger]: I0417 03:09:33.000000 53 configuration_file_resolver.cc:41] Found '/workspace/install/fishbot_laser_driver/share/fishbot_laser_driver/config/fishbot_laser_2d.lua' for 'fishbot_laser_2d.lua'.
[cartographer_node-3] [INFO] [1713323373.470254898] [cartographer logger]: I0417 03:09:33.000000 53 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/map_builder.lua' for 'map_builder.lua'.
[cartographer_node-3] [INFO] [1713323373.471063510] [cartographer logger]: I0417 03:09:33.000000 53 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/map_builder.lua' for 'map_builder.lua'.
[cartographer_node-3] [INFO] [1713323373.472037645] [cartographer logger]: I0417 03:09:33.000000 53 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/pose_graph.lua' for 'pose_graph.lua'.
[cartographer_node-3] [INFO] [1713323373.472087576] [cartographer logger]: I0417 03:09:33.000000 53 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/pose_graph.lua' for 'pose_graph.lua'.
[cartographer_node-3] [INFO] [1713323373.472576546] [cartographer logger]: I0417 03:09:33.000000 53 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder.lua' for 'trajectory_builder.lua'.
[cartographer_node-3] [INFO] [1713323373.472652258] [cartographer logger]: I0417 03:09:33.000000 53 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder.lua' for 'trajectory_builder.lua'.
[cartographer_node-3] [INFO] [1713323373.473540021] [cartographer logger]: I0417 03:09:33.000000 53 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder_2d.lua' for 'trajectory_builder_2d.lua'.
[cartographer_node-3] [INFO] [1713323373.473565354] [cartographer logger]: I0417 03:09:33.000000 53 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder_2d.lua' for 'trajectory_builder_2d.lua'.
[cartographer_node-3] [INFO] [1713323373.475454388] [cartographer logger]: I0417 03:09:33.000000 53 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder_3d.lua' for 'trajectory_builder_3d.lua'.
[cartographer_node-3] [INFO] [1713323373.475525833] [cartographer logger]: I0417 03:09:33.000000 53 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder_3d.lua' for 'trajectory_builder_3d.lua'.
[cartographer_node-3] [INFO] [1713323373.513228297] [cartographer logger]: I0417 03:09:33.000000 53 map_builder_bridge.cpp:136] Added trajectory with ID '0'.
[rviz2-5] QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-root'
[rviz2-5] [INFO] [1713323375.276606532] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-5] [INFO] [1713323375.276847655] [rviz2]: OpenGl version: 4.1 (GLSL 4.1)
[rviz2-5] [INFO] [1713323375.377706087] [rviz2]: Stereo is NOT SUPPORTED
[INFO] [rviz2-5]: process has finished cleanly [pid 57]
^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)
[static_transform_publisher-2] [INFO] [1713323445.889626697] [rclcpp]: signal_handler(signum=2)
[cartographer_occupancy_grid_node-4] [INFO] [1713323445.889629396] [rclcpp]: signal_handler(signum=2)
[laser_x2-1] Traceback (most recent call last):
[laser_x2-1] File "/workspace/install/fishbot_laser_driver/lib/fishbot_laser_driver/laser_x2", line 33, in <module>
[laser_x2-1] sys.exit(load_entry_point('fishbot-laser-driver==0.0.0', 'console_scripts', 'laser_x2')())
[laser_x2-1] File "/workspace/install/fishbot_laser_driver/lib/python3.10/site-packages/fishbot_laser_driver/fishbot_laser_x2.py", line 83, in main
[cartographer_node-3] [INFO] [1713323445.890779139] [rclcpp]: signal_handler(signum=2)
[cartographer_node-3] [INFO] [1713323445.892393929] [cartographer logger]: I0417 03:10:45.000000 53 node.cpp:569] Shutdown the subscriber of [scan]
[cartographer_node-3] [INFO] [1713323445.892404802] [cartographer logger]: I0417 03:10:45.000000 53 map_builder_bridge.cpp:152] Finishing trajectory with ID '0'...
[cartographer_node-3] [INFO] [1713323445.892462594] [cartographer logger]: I0417 03:10:45.000000 53 map_builder_bridge.cpp:161] Running final trajectory optimization...
[cartographer_node-3] [INFO] [1713323445.892541842] [cartographer logger]: I0417 03:10:45.000000 90 pose_graph_2d.cc:538] Remaining work items in queue: 2
[cartographer_node-3] [INFO] [1713323445.892582549] [cartographer logger]: I0417 03:10:45.000000 90 constraint_builder_2d.cc:290] 0 computations resulted in 0 additional constraints.
[cartographer_node-3] [INFO] [1713323445.892593095] [cartographer logger]: I0417 03:10:45.000000 90 constraint_builder_2d.cc:292] Score histogram:
[cartographer_node-3] Count: 0
[cartographer_node-3] [INFO] [1713323445.892601242] [cartographer logger]: I0417 03:10:45.000000 90 pose_graph_2d.cc:538] Remaining work items in queue: 1
[cartographer_node-3] [INFO] [1713323445.892608468] [cartographer logger]: I0417 03:10:45.000000 90 constraint_builder_2d.cc:290] 0 computations resulted in 0 additional constraints.
[cartographer_node-3] [INFO] [1713323445.892612679] [cartographer logger]: I0417 03:10:45.000000 90 constraint_builder_2d.cc:292] Score histogram:
[cartographer_node-3] Count: 0
[laser_x2-1] SocketServer()
[laser_x2-1] File "/workspace/install/fishbot_laser_driver/lib/python3.10/site-packages/fishbot_laser_driver/fishbot_laser_x2.py", line 35, in init
[laser_x2-1] self.main()
[laser_x2-1] File "/workspace/install/fishbot_laser_driver/lib/python3.10/site-packages/fishbot_laser_driver/fishbot_laser_x2.py", line 52, in main
[laser_x2-1] client, client_address = s.accept()
[laser_x2-1] File "/usr/lib/python3.10/socket.py", line 293, in accept
[cartographer_node-3] [INFO] [1713323445.897581908] [cartographer logger]: I0417 03:10:45.000000 93 constraint_builder_2d.cc:290] 0 computations resulted in 0 additional constraints.
[cartographer_node-3] [INFO] [1713323445.897597265] [cartographer logger]: I0417 03:10:45.000000 93 constraint_builder_2d.cc:292] Score histogram:
[cartographer_node-3] Count: 0
[laser_x2-1] fd, addr = self._accept()
[laser_x2-1] KeyboardInterrupt
Optimizing: Done.
[cartographer_node-3] [INFO] [1713323445.908903661] [cartographer logger]: I0417 03:10:45.000000 92 constraint_builder_2d.cc:290] 0 computations resulted in 0 additional constraints.
[cartographer_node-3] [INFO] [1713323445.908924915] [cartographer logger]: I0417 03:10:45.000000 92 constraint_builder_2d.cc:292] Score histogram:
[cartographer_node-3] Count: 0
Optimizing: Done.
[ERROR] [laser_x2-1]: process has died [pid 49, exit code -2, cmd '/workspace/install/fishbot_laser_driver/lib/fishbot_laser_driver/laser_x2 --ros-args -r __node:=laser_x2'].
[INFO] [static_transform_publisher-2]: process has finished cleanly [pid 51]
[INFO] [cartographer_occupancy_grid_node-4]: process has finished cleanly [pid 55]
[INFO] [cartographer_node-3]: process has finished cleanly [pid 53]
#? 2
[INFO] [launch]: All log files can be found below /root/.ros/log/2024-04-17-03-10-59-823487-0e0b6e597728-119
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [laser_x2-1]: process started with pid [120]
[INFO] [static_transform_publisher-2]: process started with pid [122]
[INFO] [cartographer_node-3]: process started with pid [124]
[INFO] [cartographer_occupancy_grid_node-4]: process started with pid [136]
[INFO] [rviz2-5]: process started with pid [138]
[static_transform_publisher-2] [WARN] [1713323459.910656240] []: Old-style arguments are deprecated; see --help for new-style arguments
[static_transform_publisher-2] [INFO] [1713323459.922487664] [static_tf_pub_laser]: Spinning until stopped - publishing transform
[static_transform_publisher-2] translation: ('0.000000', '0.000000', '0.000000')
[static_transform_publisher-2] rotation: ('0.000000', '0.000000', '0.000000', '1.000000')
[static_transform_publisher-2] from 'base_link' to 'laser_frame'
[cartographer_node-3] [INFO] [1713323459.989363279] [cartographer logger]: I0417 03:10:59.000000 124 configuration_file_resolver.cc:41] Found '/workspace/install/fishbot_laser_driver/share/fishbot_laser_driver/config/fishbot_laser_2d.lua' for 'fishbot_laser_2d.lua'.
[cartographer_node-3] [INFO] [1713323459.992598529] [cartographer logger]: I0417 03:10:59.000000 124 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/map_builder.lua' for 'map_builder.lua'.
[cartographer_node-3] [INFO] [1713323459.993731283] [cartographer logger]: I0417 03:10:59.000000 124 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/map_builder.lua' for 'map_builder.lua'.
[cartographer_node-3] [INFO] [1713323459.994592105] [cartographer logger]: I0417 03:10:59.000000 124 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/pose_graph.lua' for 'pose_graph.lua'.
[cartographer_node-3] [INFO] [1713323459.995089465] [cartographer logger]: I0417 03:10:59.000000 124 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/pose_graph.lua' for 'pose_graph.lua'.
[cartographer_node-3] [INFO] [1713323459.995736823] [cartographer logger]: I0417 03:10:59.000000 124 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder.lua' for 'trajectory_builder.lua'.
[cartographer_node-3] [INFO] [1713323459.996473406] [cartographer logger]: I0417 03:10:59.000000 124 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder.lua' for 'trajectory_builder.lua'.
[cartographer_node-3] [INFO] [1713323459.997757398] [cartographer logger]: I0417 03:10:59.000000 124 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder_2d.lua' for 'trajectory_builder_2d.lua'.
[cartographer_node-3] [INFO] [1713323459.998694898] [cartographer logger]: I0417 03:10:59.000000 124 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder_2d.lua' for 'trajectory_builder_2d.lua'.
[cartographer_node-3] [INFO] [1713323459.999343172] [cartographer logger]: I0417 03:10:59.000000 124 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder_3d.lua' for 'trajectory_builder_3d.lua'.
[cartographer_node-3] [INFO] [1713323460.000050997] [cartographer logger]: I0417 03:11:00.000000 124 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder_3d.lua' for 'trajectory_builder_3d.lua'.
[rviz2-5] QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-root'
[cartographer_node-3] [INFO] [1713323460.013546805] [cartographer logger]: I0417 03:11:00.000000 124 map_builder_bridge.cpp:136] Added trajectory with ID '0'.
[rviz2-5] [INFO] [1713323461.468663953] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-5] [INFO] [1713323461.470127987] [rviz2]: OpenGl version: 4.1 (GLSL 4.1)
[rviz2-5] [INFO] [1713323461.502845070] [rviz2]: Stereo is NOT SUPPORTED
[laser_x2-1] timout count: 1
[cartographer_node-3] [INFO] [1713323481.123088627] [cartographer logger]: I0417 03:11:21.000000 124 ordered_multi_queue.cc:172] All sensor data for trajectory 0 is available starting at '638489202810840850'.
[cartographer_node-3] [INFO] [1713323481.123138202] [cartographer logger]: I0417 03:11:21.000000 124 collated_trajectory_builder.cc:81] scan rate: unknown
[cartographer_node-3] [INFO] [1713323481.123171552] [cartographer logger]: I0417 03:11:21.000000 124 local_trajectory_builder_2d.cc:135] Extrapolator is still initializing.
[cartographer_node-3] [INFO] [1713323481.150925466] [cartographer logger]: I0417 03:11:21.000000 124 pose_graph_2d.cc:148] Inserted submap (0, 0).
[rviz2-5] [INFO] [1713323482.028109586] [rviz2]: Trying to create a map of size 156 x 72 using 1 swatches
[rviz2-5] [ERROR] [1713323482.054869295] [rviz2]: Vertex Program:rviz/glsl120/indexed_8bit_image.vert Fragment Program:rviz/glsl120/indexed_8bit_image.frag GLSL link result :
[rviz2-5] active samplers with a different type refer to the same texture image unit
[rviz2-5] [ERROR] [1713323483.856608731] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713323483.861673 but the latest data is at time 1713323483.861673, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713323485.386181754] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713323485.397941 but the latest data is at time 1713323485.397691, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [INFO] [1713323488.007710668] [rviz2]: Trying to create a map of size 158 x 73 using 1 swatches
[rviz2-5] [ERROR] [1713323488.456158042] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713323488.462029 but the latest data is at time 1713323488.461279, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [INFO] [1713323489.001771792] [rviz2]: Trying to create a map of size 160 x 74 using 1 swatches
[rviz2-5] [ERROR] [1713323489.863286941] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713323489.861070 but the latest data is at time 1713323489.860945, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [INFO] [1713323491.042040818] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1713323481.033 for reason 'the timestamp on the message is earlier than all the data in the transform cache'
[rviz2-5] [INFO] [1713323491.125363673] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1713323481.123 for reason 'the timestamp on the message is earlier than all the data in the transform cache'
[rviz2-5] [ERROR] [1713323491.432702030] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713323491.444609 but the latest data is at time 1713323491.429419, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713323492.969022591] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713323492.968907 but the latest data is at time 1713323492.968782, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [INFO] [1713323493.992594985] [rviz2]: Trying to create a map of size 160 x 155 using 1 swatches
[rviz2-5] [ERROR] [1713323494.664151929] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713323494.659646 but the latest data is at time 1713323494.659021, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713323494.892792809] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713323494.936818 but the latest data is at time 1713323494.936818, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713323495.015974891] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713323495.061806 but the latest data is at time 1713323495.061556, when looking up transform from frame [laser_frame] to frame [map]
[rviz2-5] [ERROR] [1713323495.176454398] [rviz2]: Lookup would require extrapolation into the future. Requested time 1713323495.186660 but the latest data is at time 1713323495.186035, when looking up transform from frame [laser_frame] to frame [map]
[cartographer_node-3] [INFO] [1713323496.388982766] [cartographer logger]: I0417 03:11:36.000000 124 collated_trajectory_builder.cc:81] scan rate: 1.63 Hz 6.12e-01 s +/- 6.30e-01 s (pulsed at 99.92% real time)
[rviz2-5]
-
@mixllred
) 驱动雷达
2) 建图测试
3) 退出
#? 1
UART2SOCKET:8888->/tmp/fishbot_laser
Prepare to Accept connect!
3 <socket.socket fd=6, family=AddressFamily.AF_INET, type=SocketKind.SOCK_STREAM, proto=0, laddr=('172.17.0.2', 8888), raddr=('192.168.43.165', 62416)> 4
PTY: Opened /dev/pts/1 for 0.0.0.0:8888
[YDLIDAR INFO] Current ROS Driver Version: 1.4.5
[YDLIDAR]:SDK Version: 1.4.5
[YDLIDAR]:Lidar running correctly ! The health status: good
[YDLIDAR] Connection established in [/tmp/fishbot_laser][115200]:
Firmware version: 1.5
Hardware version: 1
Model: S4
Serial: 2020101300002268
[YDLIDAR]:Fixed Size: 360
[YDLIDAR]:Sample Rate: 3K
[YDLIDAR INFO] Current Sampling Rate : 3K
[YDLIDAR INFO] Now YDLIDAR is scanning ......
timout count: 1
[ERROR] [1713344387.186853131] [ydlidar_node]: Failed to get scan
timout count: 2
[ERROR] [1713344389.187233959] [ydlidar_node]: Failed to get scan
[ERROR] [1713344391.188039318] [ydlidar_node]: Failed to get scan
[ERROR] [1713344393.188949412] [ydlidar_node]: Failed to get scan
[ERROR] [1713344395.189370541] [ydlidar_node]: Failed to get scan
[ERROR] [1713344397.190185397] [ydlidar_node]: Failed to get scan
[ERROR] [1713344399.191660545] [ydlidar_node]: Failed to get scan
[ERROR] [1713344401.191919681] [ydlidar_node]: Failed to get scan
[ERROR] [1713344403.192957289] [ydlidar_node]: Failed to get scan
[ERROR] [1713344405.193506477] [ydlidar_node]: Failed to get scan
[ERROR] [1713344407.194619107] [ydlidar_node]: Failed to get scan
[ERROR] [1713344409.195089088] [ydlidar_node]: Failed to get scan
[ERROR] [1713344411.195370974] [ydlidar_node]: Failed to get scan
[ERROR] [1713344413.196157579] [ydlidar_node]: Failed to get scan -
@mixllred 请按照要求,单独发帖提问
-
-
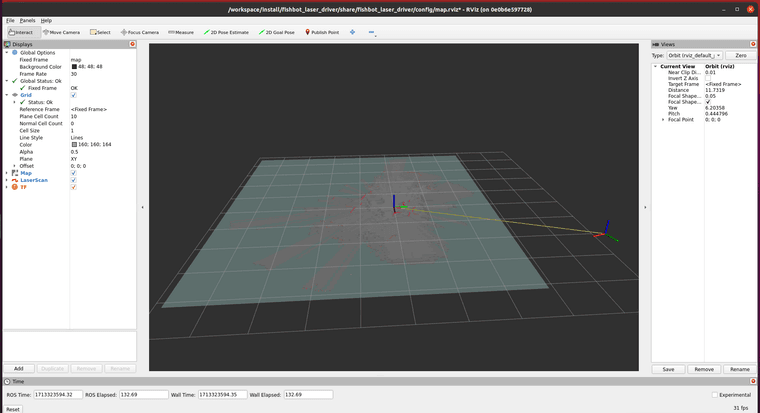
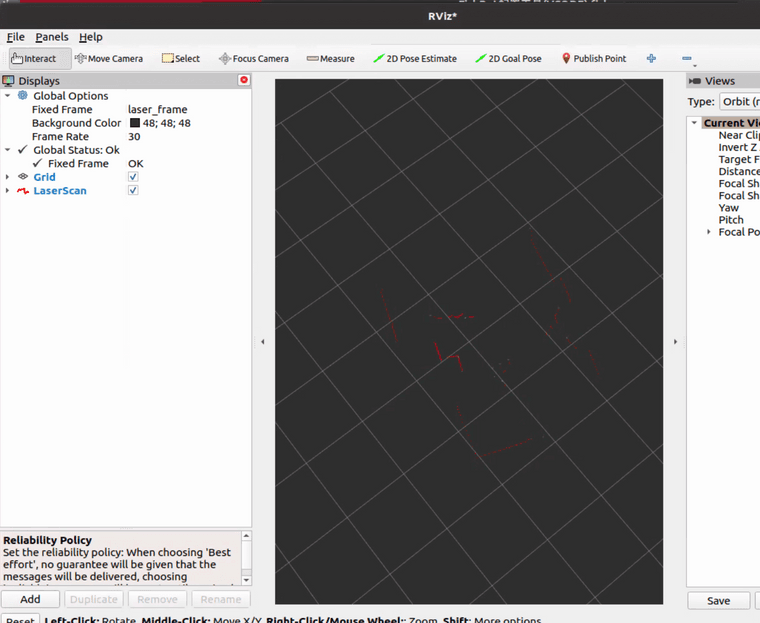
雷达建图不是很清晰,感觉很模糊,是啥问题,如何解决
-
针对第四步,点云数据已经有了,但是Crtl+C,然后输入2之后,并没有产生建图,我遗漏了哪些步骤吗?
-
@1006076811 在 [FishBot教程] 6. 雷达驱动及建图测试 中说:
针对第四步,点云数据已经有了,但是Crtl+C,然后输入2之后,并没有产生建图,我遗漏了哪些步骤吗?
我明白了,需要在rviz2里再添加一个map的监视
-
我这 确实没有 /scan 话题
-
可以正常启动,但是过了一会就会显示failed to get scan 跳帽也转成wifi模式了,请问怎么解决,topic list中也没有话题 -
@1141682555
有时候也有报错
“Failed to turn on the Lidar, because the lidar is blocked or the lidar hardware is faulty” -
@1141682555 这个一般是网络不稳定造成的,优化网络结构可以解决