构建第一章导航地图时,地图不受控制疯狂漂移,而且地图不断扩大
-
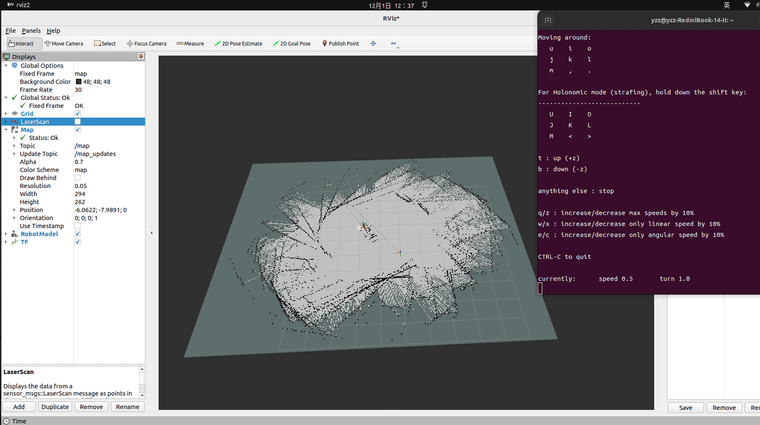
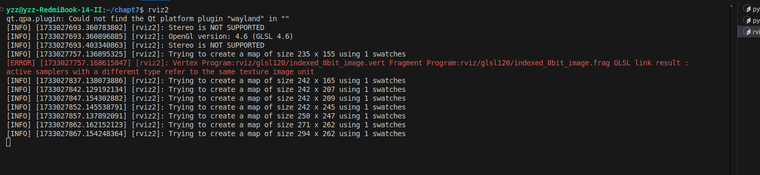
我在构建第一章导航地图时,使用键盘控制仿真小车扫描房间地图,感觉小车不受键盘控制一样,我按前进小车会偏着乱走,我的移动速度已经调的很慢了,然后构建的地图疯狂偏移,还不断扩大。rviz图片和rviz的终端界面如下图,请鱼哥和各位大佬为我解惑,感谢。
-
-
@3240806419 校准里程计,换个大点的环境
-
@小鱼 鱼哥,怎么去校准里程计阿,我这个是仿真的。
-
@3240806419 先换个大环境看看
-
我之前也遇到这个问题,我的解决方案是加上Laserscan,你可以尝试下
-
@1119041670 你好,请问可以分享一下具体操作吗?
-
@小鱼 鱼哥我换了一个180平的大环境,还是一样的问题,报一样的错,你指点我一下怎么校准里程计呗,感谢鱼哥。
-
@1119041670 感谢老哥,但是我试过了这个方法,还是报一样的错。
-
@3240806419 你用我书里的源码试试
-
@铁盒的序 这个老哥的意思就是,在add那里再加一个叫做laserscan的话题
-
@小鱼 鱼哥,我就是用的你书上的源码,但是是第一版的。
-
代码我检查过没什么问题,我是跟着鱼哥你的B站视频敲的一样的代码
-
@3240806419 好的谢谢
-
@3240806419 报错确实会报错的,你看小鱼的视频里面切回去的时候也报错了,我当时主要地图会飘的问题解决了,你那个问题解决了么?
-
@铁盒的序 从topic添加雷达,还有那个地图扩大是貌似是正常的,一般来说地图随着探索好像就是会不断变大的
-
@1119041670 我的地图还是漂移,而且我感觉我控制不了小车一样,它走着走着就会偏,而且转向键按了没有反应。
-
@1119041670 我添加了雷达没有效果地图还是漂移诶,请问你的地图漂移是怎么解决的阿。
-
@3240806419 那就不太清楚了,我当时就是添加了雷达,降速,扩大地图平面,之后他就好了,我还以为是添加了雷达他自动回环检测来着的。。。
-
@3240806419 我也是遇到同样的问题,好像最关键点在于里程计。我也一直没有解决。在更换房间后也是同样的问题。并且对于地图中的仿真小车只能前进和后退不能够旋转。