[FishBot教程] 9.0.6. 雷达驱动及建图测试
-
建图的时候从这里开始下面都是WARN -
从这里警告就变成红色了
-
@3315708838 没事的,能出图吗
-
@小鱼 能出图但是漂移很严重
-
@3315708838 网络结构是什么样子的
-
@小鱼 就2.4G的网络
-
@3315708838 电脑这边是无线还是有线
-
@小鱼 无线的,连的实验室的WIFI
-
@3315708838 电脑这边走有线,这样应该就行了
-
@小鱼
ok,我也上闲鱼淘一个试试 -
 架构不兼容怎么办
架构不兼容怎么办 -
请问一下小鱼我能成功完成1)WIFI转串口测试和 2) 驱动雷达,但是打开新终端输入ros2 topic list没有任何话题显示是为什么?输入ros2 topic hz /scan显示下面这些:
sszb-wan@sszb-2:/mnt/c/WINDOWS/system32$ ros2 topic hz /scan
WARNING: topic [/scan] does not appear to be published yet
average rate: 6.638
min: 0.146s max: 0.156s std dev: 0.00280s window: 8
average rate: 6.629
min: 0.146s max: 0.156s std dev: 0.00281s window: 15
average rate: 6.637
min: 0.146s max: 0.156s std dev: 0.00253s window: 22
average rate: 6.633
min: 0.146s max: 0.156s std dev: 0.00239s window: 29 -
@591259845 这表示正常的意思
-
@小鱼 但是我ros2 topic list后什么话题都没有,scan话题也没有,后续可以建图但是建好的地图不能保存。
sszb-wan@sszb-2:/mnt/c/Users/qianr$ ros2 topic list
^Csszb-wan@sszb-2:/mnt/c/Users/qianr$
sszb-wan@sszb-2:/mnt/c/Users/qianr$ ros2 topic list -
@591259845 什么系统平台软件
-
@小鱼 JI就是正常的win11+wsl2+Ubuntu22.04+ROS2 humble,但是我WSL2用的是新版本推荐的镜像网络不是桥接网络,我有时间试下还是用桥接网络行不行。
-
@591259845 在 [FishBot教程] 9.0.6. 雷达驱动及建图测试 中说:
@小鱼 JI就是正常的win11+wsl2+Ubuntu22.04+ROS2 humble,但是我WSL2用的是新版本推荐的镜像网络不是桥接网络,我有时间试下还是用桥接网络行不行。
用回桥接网络就好了。。。。
-
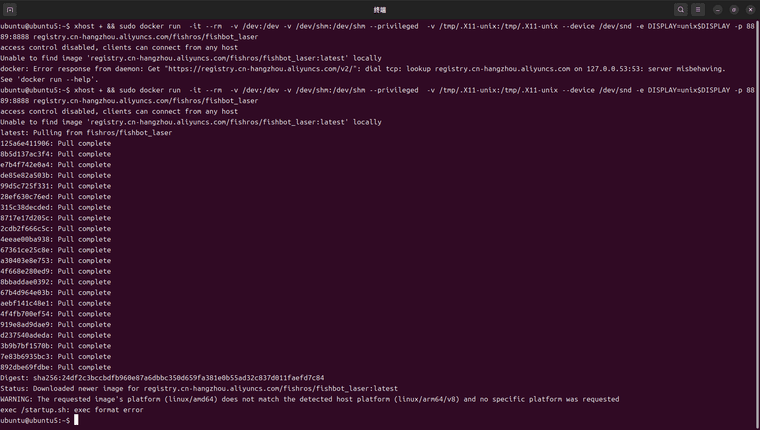
请问下小鱼,为什么启动雷达驱动的时候经常会报这种错?是不是docker挂了?
sszb@sszb-2:/mnt/c/Users/qianr$ xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser
access control disabled, clients can connect from any host
[sudo] password for sszb:
docker: Error response from daemon: failed to set up container networking: driver failed programming external connectivity on endpoint bold_tu (af0f4c653e527e9407e785a9649362e8553ab0d0245a2b885bafaa9af2efb849): Bind for 0.0.0.0:8889 failed: port is already allocatedRun 'docker run --help' for more information
-
-
ubuntu 22.04 雷达驱动话题没显示,但是测试建图会有图,建图没法保存,上面的issue也看到了类似问题。需要怎么解决