拓展3:FishBot 树莓派配置建图导航
-
@一百个苹果 应该是连在一起的才对
-
@小鱼 本来是完整的tf_tree,但是一运行slam_toolbox online_async_launch.py后tf_tree就只剩两个节点了,不知道什么原因
-
@小鱼 问题解决了,让虚拟机和树莓派之间使用ntp服务同步时间后就正常了
-
@一百个苹果 ok
-
鱼哥为啥我的树莓派4b2g建图导航的时候特别卡,用ssh连的时候rviz几乎动不了,小车也是原地转圈
-
@苛性钠zzz 哈喽,你的那个树莓派和
 这个板子如何接线的呀
这个板子如何接线的呀 -
@1117 usb连接就行
-
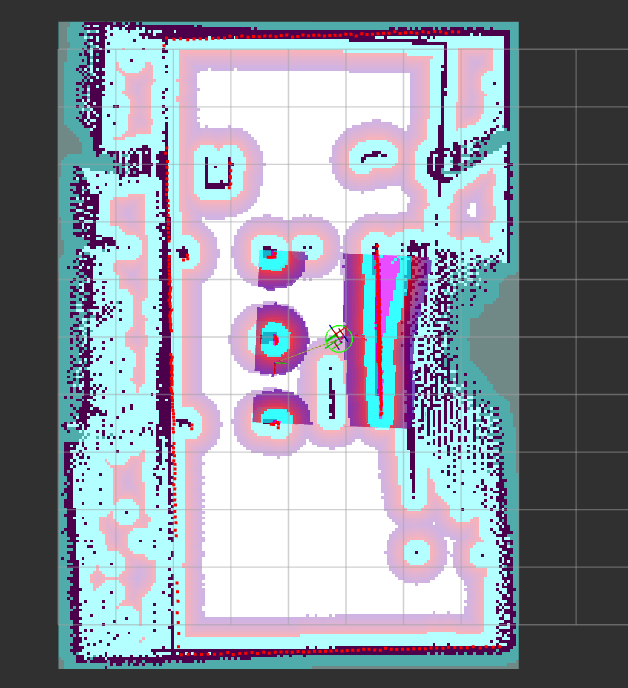
@小鱼 您好,进行导航时点击了Nav2 Goal,机器人没有反应。
rviz画面: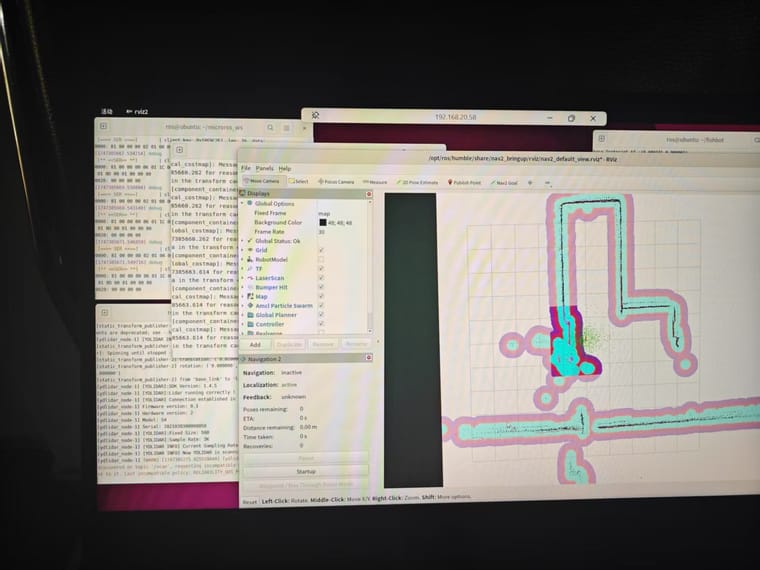
LaserScan间断标红报错
等待大概五分钟后rviz画面如图:
出现轨迹规划但是机器人全程无反应,图像更新基本没有,fps基本为0
Navigation2的Feeback显示中止或者未知运行导航代码指令ros2 launch fishbot_navigation2 navigation2.launch.py开启rviz后,终端回复基本是:
Message Filter dropping message: frame 'laser_frame' at time 1747379107.151 for reason 'the timestamp on the message is earlier than all the data in the transform cache'
消息过滤器丢弃消息:帧 'laser_frame' 在时间 1747379107.151,原因是“消息上的时间戳早于转换缓存中的所有数据”。建图时map的resolution我改为0.02(原来是0.05,0.05图像有点粗糙),代价地图这些我没有改动。
使用树莓派4b,雷达板和主控板连接树莓派使用数据线,电脑远程桌面连接,网络是手机热点5G。建图时没有问题。 -
@3132495710 看看有没有发送 /cmd_vel
-
@小鱼
 ,自主建图为啥总是会出现这种情况?
,自主建图为啥总是会出现这种情况? -
@小鱼 有发送
ros@ubuntu:~$ ros2 topic list
/amcl/transition_event
/amcl_pose
/behavior_server/transition_event
/behavior_tree_log
/bond
/bt_navigator/transition_event
/clicked_point
/cmd_vel
/cmd_vel_nav
/controller_server/transition_event
/cost_cloud
/diagnostics
/downsampled_costmap
/downsampled_costmap_updates
/evaluation
/global_costmap/costmap
/global_costmap/costmap_raw
/global_costmap/costmap_updates
/global_costmap/footprint
/global_costmap/global_costmap/transition_event
/global_costmap/published_footprint
/global_costmap/voxel_marked_cloud
/goal_pose
/imu
/initialpose
/joint_states
/local_costmap/clearing_endpoints
/local_costmap/costmap
/local_costmap/costmap_raw
/local_costmap/costmap_updates
/local_costmap/footprint
/local_costmap/local_costmap/transition_event
/local_costmap/published_footprint
/local_costmap/voxel_grid
/local_costmap/voxel_marked_cloud
/local_plan
/map
/map_server/transition_event
/map_updates
/marker
/mobile_base/sensors/bumper_pointcloud
/odom
/parameter_events
/particle_cloud
/plan
/plan_smoothed
/planner_server/transition_event
/received_global_plan
/robot_description
/rosout
/scan
/smoother_server/transition_event
/speed_limit
/tf
/tf_static
/transformed_global_plan
/velocity_smoother/transition_event
/waypoint_follower/transition_event
/waypoints
/ydlidar_node/transition_event -
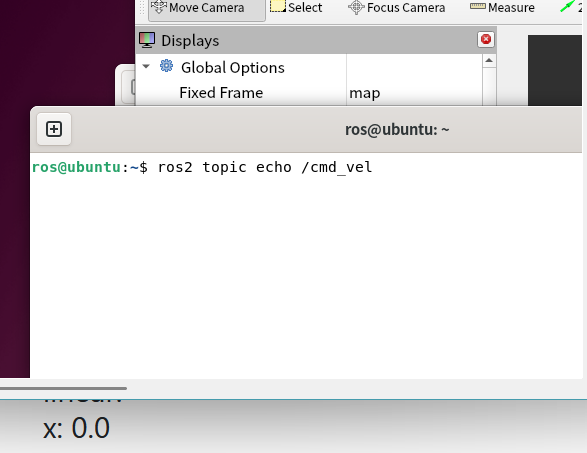
@3132495710 ros2 topic echo /cmd_vel
-
@小鱼 :有几次是启动了,但是走的很卡顿,数据变化很少基本是
x: 0.0
y: 0.0
z: 0.0linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0还有命令终端没有反应 -
-
@Dutton_Ranch 我也是只有显示红点,怎么才能看见实时地图呢
-
可以用树莓派5进行安装吗?