[FishBot教程] 9.0.6. 雷达驱动及建图测试
-
@2458348057 怎么解决的啊,求教!
-
@小鱼 在 [FishBot教程] 6. 雷达驱动及建图测试 中说:
xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser
鱼哥,我配置最新的固件,ping也是通的,但就是没有收到回复
Ubuntu是22.04,装的也是ros2
-
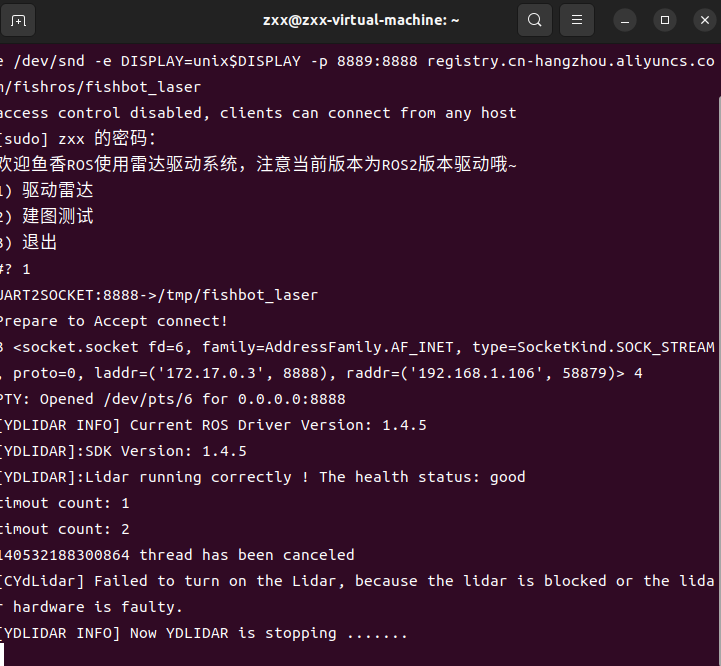
@2689876497 雷达转吗,是否插反了
-
 小 小鱼 在 中 引用了 这个主题
小 小鱼 在 中 引用了 这个主题
-
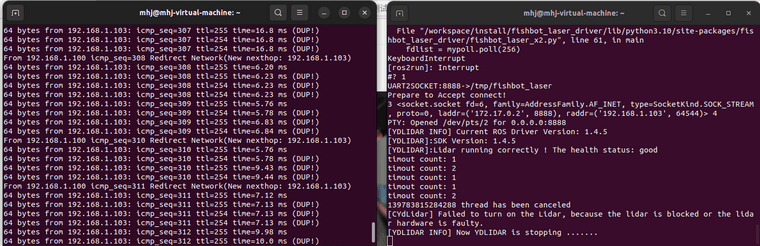
能够ping通雷达,而且雷达也在旋转,蓝灯处于闪烁状态。但是一直没有雷达数据传输。
-
@913869698 什么网络环境,左边窗口是 ping 的吗
-
@小鱼 左边是ping的,有时候正常有时候就比较奇怪。但是都是一直在跳的。网络是主机(笔记本)Wi-Fi连接,虚拟机桥接。
-
@913869698 有没有其他路由器换个试试
-
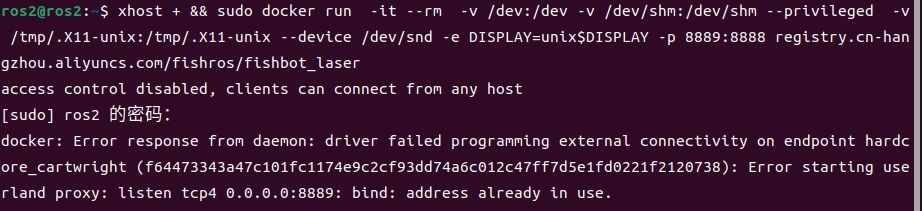
使用镜像时提示这里错误ros2@ros2:~$ xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser access control disabled, clients can connect from any host [sudo] ros2 的密码: docker: Error response from daemon: driver failed programming external connectivity on endpoint hardcore_cartwright (f64473343a47c101fc1174e9c2cf93dd74a6c012c47ff7d5e1fd0221f2120738): Error starting userland proxy: listen tcp4 0.0.0.0:8889: bind: address already in use. -
@1216898523 在 [FishBot教程] 6. 雷达驱动及建图测试 中说:
isten tcp4 0.0.0.0:8889: bind: address already in use
常见的端口占用,是不是开了多个
-
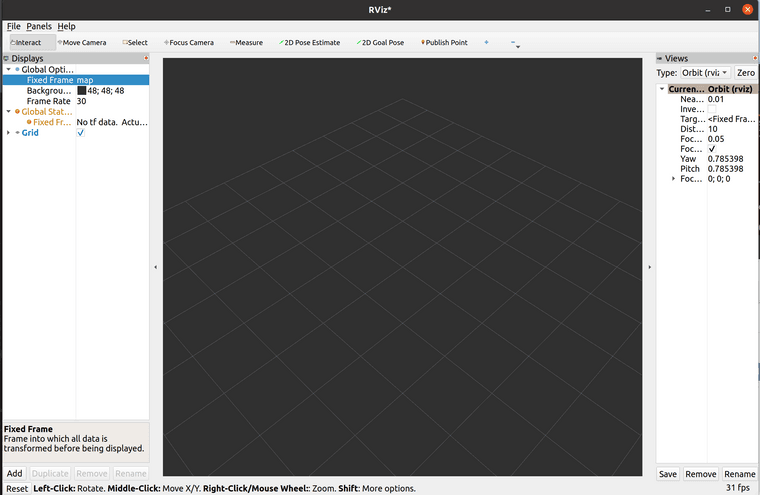
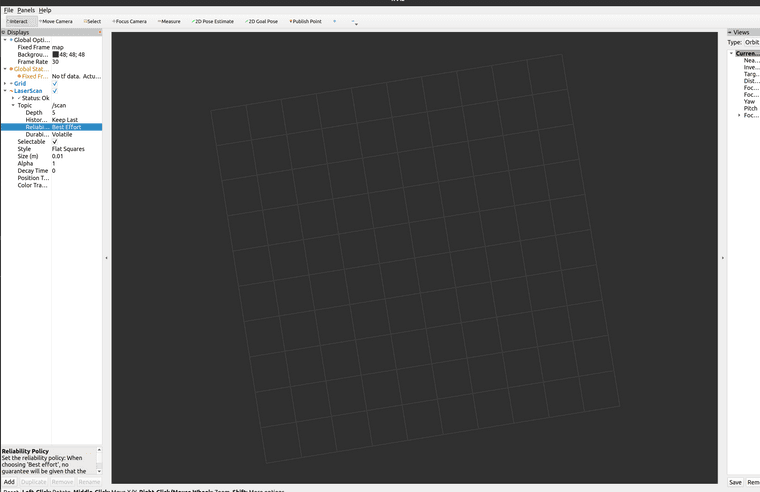
鱼哥,我的rviz里fixed_frame选项里没有laser_frame是为什么呀,之前的omed也没有,只有一个map![替代文字]
-
@深海 没得选直接输入也行
-
@小鱼 但是rviz里没有东西
-
@深海 终端里会报这个
-
@深海 给下上下文
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
一个好的提问不仅能够帮助自己理清楚问题,还有助于别人快速帮助到你。——提问的智慧
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。 -
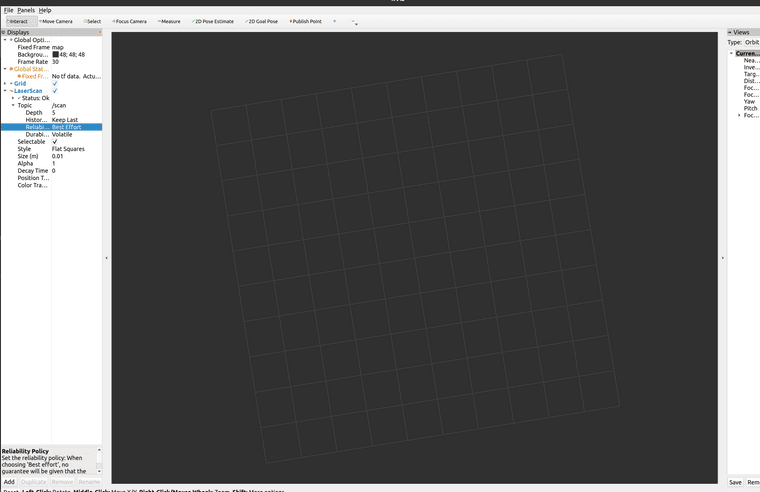
@小鱼 在用键盘控制小车移动的时候,小车可以正常运动,但是rviz里显示不出里程计
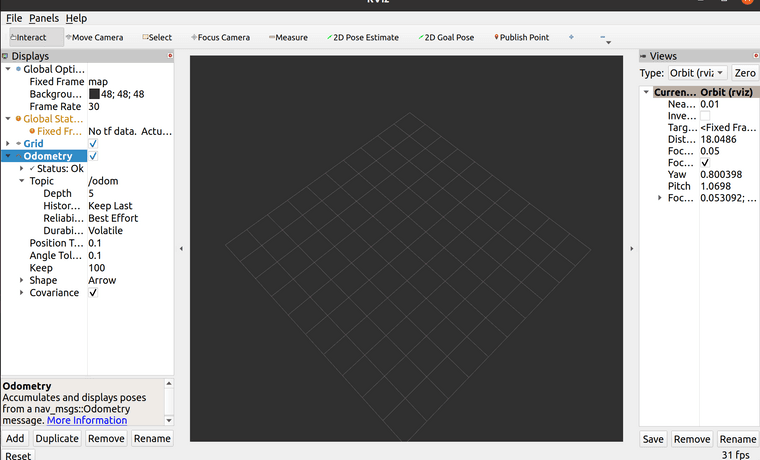
然后rviz的终端会报这个信息
在雷达驱动的时候也有这种情况,rviz里没有显示信息
Message Filter dropping message: frame 'laser_frame' at time 4328.021 for reason unknow
这是为啥
ubuntu20.04 foxy -
@深海 你的 fixed frame 都是错误的,按照教程修改
-
@小鱼 好的感谢,之前理解错意思了
-
这个怎么解决呢
-
-
@948287217 20用foxy版本试试