[FishBot教程] 9.0.3. 主控板固件烧录与配置
-
同一台电脑配置第二个fishbot,点击重新扫描配置后,一直出错,并且再也进不去配置助手的图形界面。
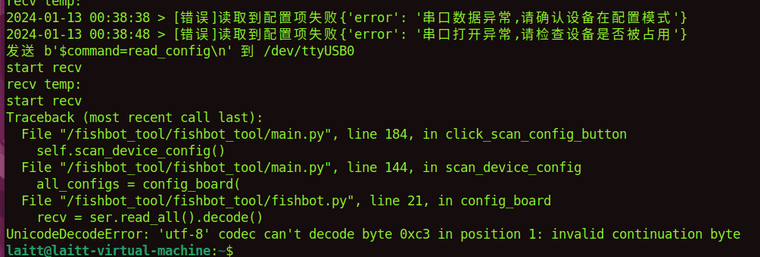
环境:笔记本直接安装的ubuntu22.04,按照本贴教程配置第一台fishbot,没有任何问题,成功配置wifi连接。配置第二台fishbot时,下载固件和烧录固件都没问题。但是点击重新扫描配置后,就闪退了,并且再也无法打开配置助手图形界面,然后报错如下:
hyq@hyq-ThinkPad:~$ xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY fishros2/fishbot-tool:v1.0.0.20230108 python3 main.py
access control disabled, clients can connect from any host
QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-root'
2024-01-09 14:07:53 > [提示]获取到当前系统设备 ['/dev/ttyUSB0']
['/dev/ttyUSB0']
发送 b'$command=read_config\n' 到 /dev/ttyUSB0
start recv
recv temp:
start recv
Traceback (most recent call last):
File "/fishbot_tool/fishbot_tool/main.py", line 243, in <module>
fishbottool = FishBotTool()
File "/fishbot_tool/fishbot_tool/main.py", line 55, in init
self.click_scan_config_button()
File "/fishbot_tool/fishbot_tool/main.py", line 184, in click_scan_config_button
self.scan_device_config()
File "/fishbot_tool/fishbot_tool/main.py", line 144, in scan_device_config
all_configs = config_board(
File "/fishbot_tool/fishbot_tool/fishbot.py", line 21, in config_board
recv = ser.read_all().decode()
UnicodeDecodeError: 'utf-8' codec can't decode byte 0xdf in position 0: invalid continuation byte应该如何处理?
谢谢! -
docker: invalid reference format.!
-
@192224801 装ROS!
-
@小鱼 很奇怪他显示我装了 humble版本的
-
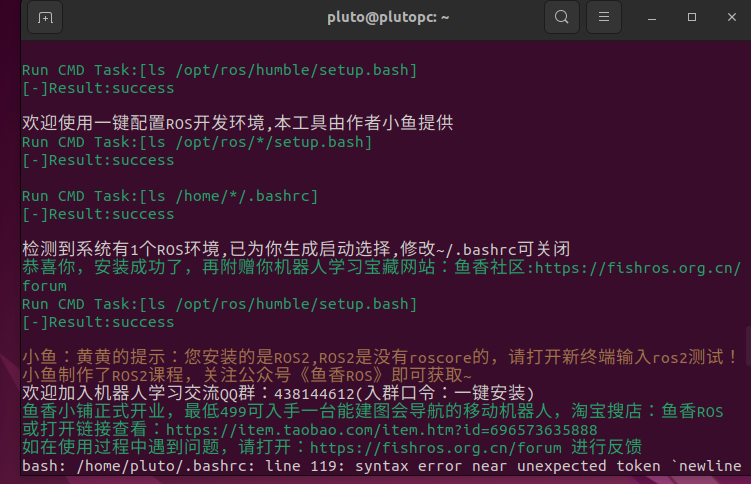
@192224801 你的 bashrc 有问题,建议先自行找到问题修复
-
@小鱼 agent没有连接上具体是什么原因 不太清除
-
@192224801
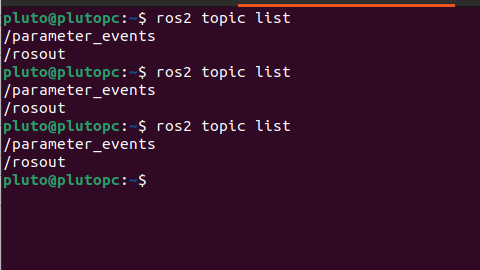
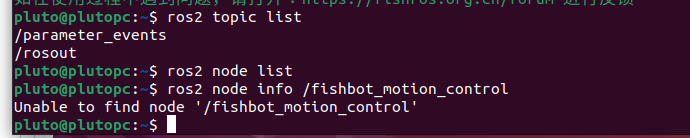 我感觉agent通的 但是这里显示不出来
我感觉agent通的 但是这里显示不出来 -
@192224801 是DDS问题,感觉是你之前破坏了一些环境变量,建议重装系统,
-
@1846805799 用无线网卡可以解决。虚拟机和小车连的都是手机热点,如果出现联网成功但还是通信不了的情况,就插个无线网卡在电脑上,在虚拟机里下载无线网卡的驱动,这时就可以连着手机热点进行虚拟机和小车之间的通信了
-
 请问这个是咋回事
请问这个是咋回事 -
在Microros服务这里,我的配置是22.04,ros humble版本,虚拟机设置的桥接模式
 ,连接的手机热点,2.4G频带的
,连接的手机热点,2.4G频带的 ,防火墙也关闭了,小车的配置都正常,虚拟机可以ping通小车,然后还是出现这样的情况,
,防火墙也关闭了,小车的配置都正常,虚拟机可以ping通小车,然后还是出现这样的情况,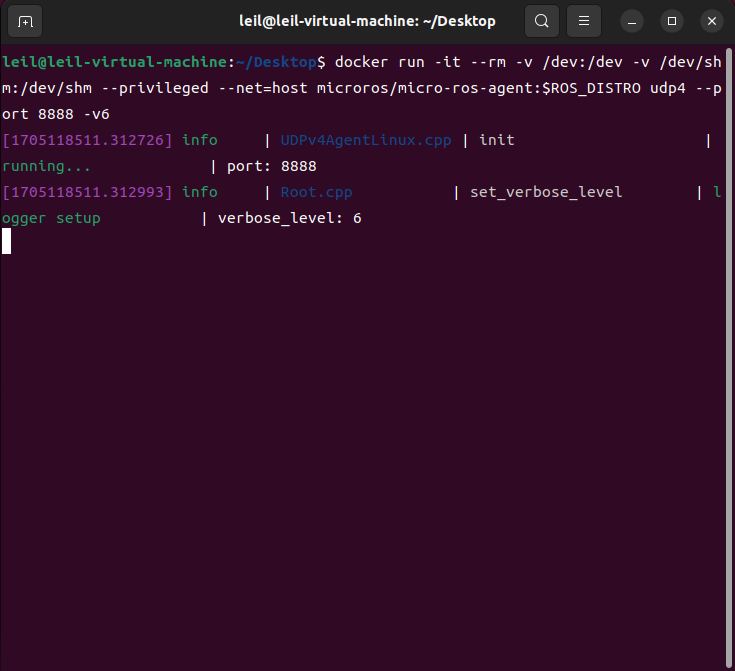 ,然后路由器也试过了,2.4G频带的,也是这样的画面,虚拟机重装试过了,电脑重启试过了,别人的电脑也试过了,都是这样的状况,能解决一下嘛
,然后路由器也试过了,2.4G频带的,也是这样的画面,虚拟机重装试过了,电脑重启试过了,别人的电脑也试过了,都是这样的状况,能解决一下嘛 -
@1923825015 小车的配置列出来一下
-
@小鱼 已经解决了
-
此回复已被删除! -
此回复已被删除! -
@小鱼 ROS相关:
[1]:一键安装(推荐):ROS(支持ROS/ROS2,树莓派Jetson)
[4]:一键配置:ROS环境(快速更新ROS环境设置,自动生成环境选择)
[3]:一键安装:rosdep(小鱼的rosdepc,又快又好用)
[9]:一键安装:Cartographer(内测版易失败)
[21]:一键安装:ROS Docker版(支持所有版本ROS/ROS2)小鱼哥,安装哪一个ROS
-


鱼哥鱼哥,请问为什么配置ip时用的也是命令出来的ip地址但下面的命令会报错呢 -
@小鱼 在 [FishBot教程] 3. 主控板固件烧录与配置 中说:
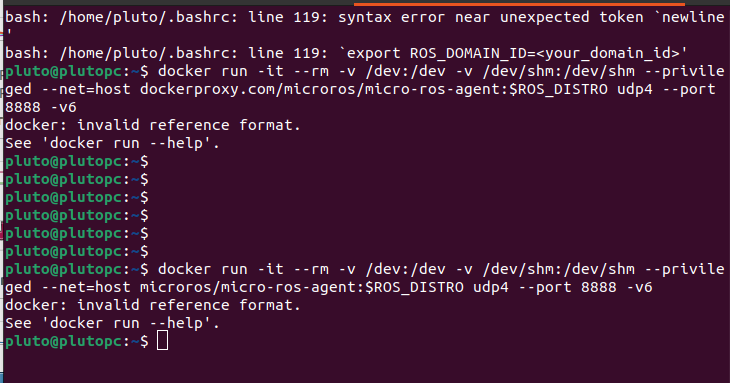
docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6
鱼哥你好!在终端中输入此指令时始终提示:
docker: invalid reference format.
See 'docker run --help'.
即使使用国内代理指令也始终报错同上。请问这种情况该如何解决呢? -
此回复已被删除! -
@378842370 已解决。将命令内$ROS_DISTRO部分替换为humble即可正常运行,网上查阅后可知遇到这种情况多是关于windows到linux粘贴文字格式的转换问题。