[FishBot教程] 9.0.3. 主控板固件烧录与配置
-
@小鱼 鱼哥,麻烦看看
-
 ls /dev/ttyUSB0
ls /dev/ttyUSB0
还是没有用 -
@mixllred lsusb 看看,上下文说说
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。 -
@1467427631 我的问题和你一模一样,你的解决了吗?
-
@1467427631 这样的情况必须重装系统了吗。。。。。
-
@sivie问题解决了吗,同样的问题。。。。
-
@小鱼 鱼哥,问题已解决,是USB线的问题
换了线就好了 -
@mixllred ok
-
@1846805799
虚拟机桥接,笔记本连接2.4GWiFi然后开热点(频段也选择2.4G但命名不同于WiFi),最后把热点的ID和密码以及虚拟机新变化的IP上传,让主控板连接上热点,上传失败就再上传一次(慢一点等机器反应过来) -
此回复已被删除! -
此回复已被删除! -
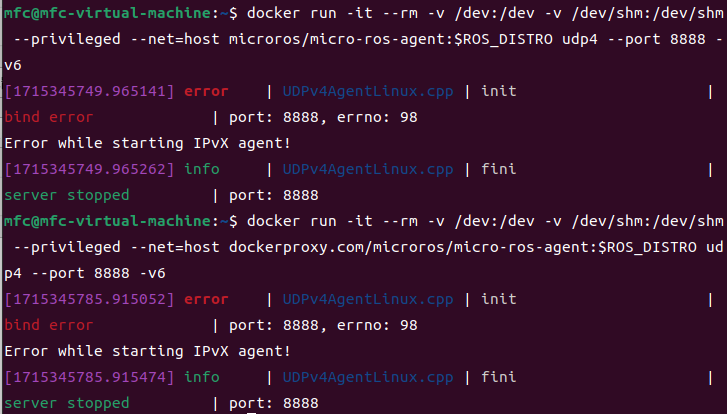 这种情况怎么处理啊
这种情况怎么处理啊 -
@3210105304
这是docker镜像占用的问题,你之前运行的docker没有正常关闭仍在运行,
使用docker ps -a找到先前docker的id,然后使用
docker stop "id"即可关闭,然后重新运行docker即可。
-
@1216898523 请问题主解决了么?我和你是同样的环境和问题
-
此回复已被删除! -
检查过wifi名称和密码,并且确定是2.4g的,不是手机热点,但是主控板就是一直显示wait connect,显示不了ip地址
-
@2413647969 确认下用户名和密码是否正确,也可以尝试手机热点(换个网络看看)
-
此回复已被删除! -
@2844989644 在 [FishBot教程] 3. 主控板固件烧录与配置 中说:
小鱼好,我在这一步出了问题。可以检测到设备端口,然后也是主控板,也可以进行一键下载固件烧录。烧录完以后配置设备那里配置项和配置值都为空,显示的具体错误如下:
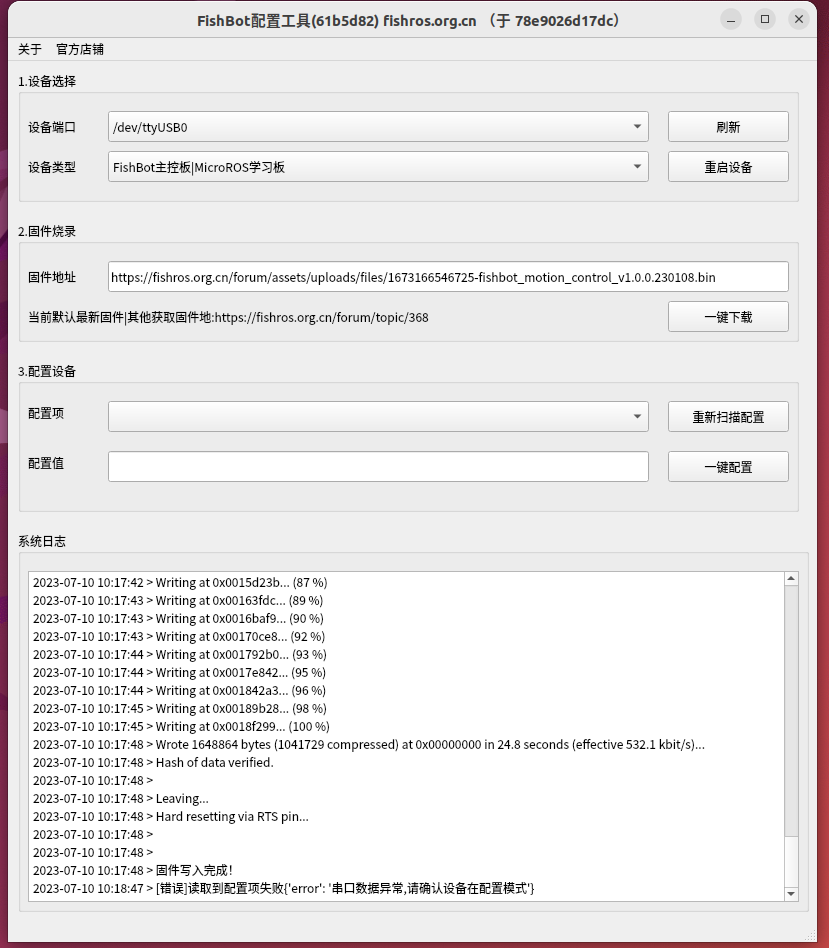
机器人是已经成功进入了udp_client模式
然后我使用的是ubuntu 22.04 安装的Ros2版本是humble我也是这样在主板烧入的时候获取不到配置项。请问你是怎么解决的?
-
[FishBot教程] 3. 主控板固件烧录与配置,wifi udp方式无法使主控板与本地本机ROS2完成通信 or 节点发现
【也一并去看了 “动手学ROS2”第14章,尝试过串口模式,一样无法完成通信】
硬件: fishbot主控板,serial 模式和 wifi-udp模式
没有使用docker的fishbot_tools(无法成功使docker内容器连接设备)。
在本地使用了 https://github.com/fishros/fishbot_tool 的main.py,启动fishbot_tools完成了fishbot_主控板的各项初始化,已经能够正常上电启动、切换 wifi-udp/serial 模式。
按照“动手学ROS2”第14章4.2 输入sudo docker run -it。。。 之后,控制台的输出为:[1721217645.738950] info | TermiosAgentLinux.cpp | init | Serial port not found. | device: /dev/ttyUSB0, error 2, waiting for connection... (大概0.5s 轮询一条相同命令)
按照本页,则仅出现2条输出: UDPv4AgentLinux.cpp和Root.cpp。
保持上述容器运行的同时,额外启动终端、通过 sudo -E docker exec -it c8563f2fc5e9 /bin/bash 登入该容器后, ls /dev/ 并没有从本地挂载的 ttyUSB0,也就是说,容器内无法找到外部挂载在本地的 /dev/ttyUSB0.
请问,目前我应该怎么让容器内的 micro-ros-agent 找到 esp32主控板内的ros节点?
其他补充
目前和教程不同的部分:
1)使用了本地已经完成安装的docker desktop,并对应完成了代理的配置,能够正常访问dockerhub;