求助,使用官方代码和套件导航部分出错
-
-
@1683127550 终端打印一定复制粘贴,方便回答者检索和引用!!!
看到了bringup,你确认了里程计话题是否正常了吗
-
-
@1683127550 雷达话题呢
-
@小鱼 雷达偶尔几次连接时会出现这样:
#? 1
UART2SOCKET:8888->/tmp/fishbot_laser
Prepare to Accept connect!但是连接成功之后还是没用,目前雷达没问题
-
@1683127550 连接成功后有全部重启吗
-
@小鱼启动后直接连接就不行,连接后全部重启之后还是不行
-
@1683127550 倒是贴一下终端日志,日志会告诉说为什么不行
-
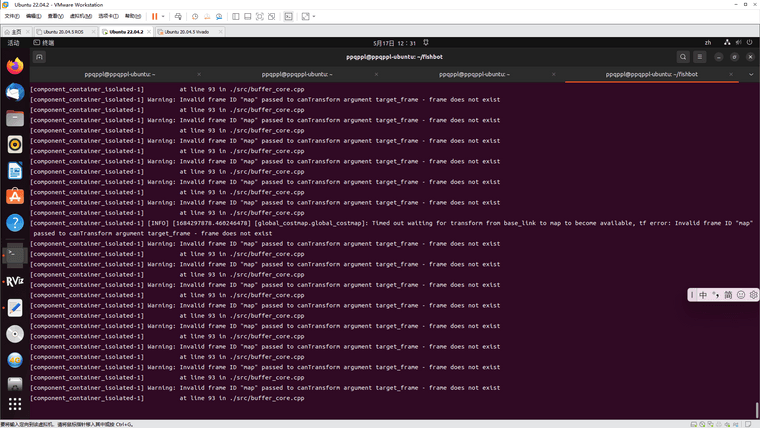
@小鱼 cal_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[component_container_isolated-1] [INFO] [1684060918.591872482] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[component_container_isolated-1] [INFO] [1684060919.091844695] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[component_container_isolated-1] [INFO] [1684060919.591846208] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[component_container_isolated-1] [INFO] [1684060920.091869820] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist
[component_container_isolated-1] [INFO] [1684060920.591862633] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID "odom" passed to canTransform argument target_frame - frame does not exist中断一直输出这一个
-
@1683127550 看一下fishbot_bringup 终端输出,这个节点负责发布 odom 到 base_link 的变换
-
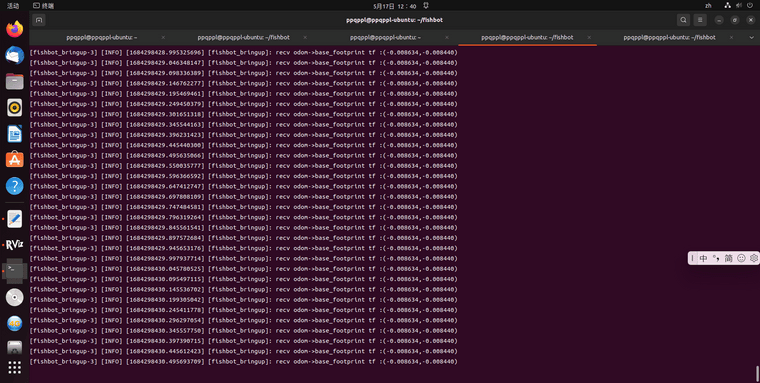
@小鱼 [fishbot_bringup-3] [INFO] [1684061786.308399678] [fishbot_bringup]: recv odom->base_footprint tf :(0.000000,0.000000)
[fishbot_bringup-3] [INFO] [1684061786.362661967] [fishbot_bringup]: recv odom->base_footprint tf :(0.000000,0.000000)
[fishbot_bringup-3] [INFO] [1684061786.408034740] [fishbot_bringup]: recv odom->base_footprint tf :(0.000000,0.000000)
[fishbot_bringup-3] [INFO] [1684061786.457737273] [fishbot_bringup]: recv odom->base_footprint tf :(0.000000,0.000000)
[fishbot_bringup-3] [INFO] [1684061786.507190908] [fishbot_bringup]: recv odom->base_footprint tf :(0.000000,0.000000)
[fishbot_bringup-3] [INFO] [1684061786.556860840] [fishbot_bringup]: recv odom->base_footprint tf :(0.000000,0.000000)
[fishbot_bringup-3] [INFO] [1684061786.606942969] [fishbot_bringup]: recv odom->base_footprint tf :(0.000000,0.000000)
[fishbot_bringup-3] [INFO] [1684061786.656883799] [fishbot_bringup]: recv odom->base_footprint tf :(0.000000,0.000000)
[fishbot_bringup-3] [INFO] [1684061786.707086627] [fishbot_bringup]: recv odom->base_footprint tf :(0.000000,0.000000)
[fishbot_bringup-3] [INFO] [1684061786.756955658] [fishbot_bringup]: recv odom->base_footprint tf :(0.000000,0.000000)
[fishbot_bringup-3] [INFO] [1684061786.807189986] [fishbot_bringup]: recv odom->base_footprint tf :(0.000000,0.000000)是这样的
-
@1683127550 动一下小车,看一下数据是否有变化,全部都是 0 有点不正常
-
@小鱼 就是我用键盘节点控制车吗,我明天试试,今天上课没啥时间,我想问一下,如果没有车能运行那个自动导航的launch吗,还是有别的部分能代替,做没有车的情况下的自动导航?
-
-
@小鱼 有开源代码集吗,类似于github开源库那种
-
@1683127550 fishbot的主分支可以直接仿真使用:https://github.com/fishros/fishbot
-
@小鱼 现在这个导航还是不行
[fishbot_bringup-3] [INFO] [1684297618.592733226] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297618.642721159] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297618.697918550] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297618.744630143] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297618.792818679] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297618.846763764] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297618.892678126] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297618.948881983] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297618.994080727] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297619.042907219] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297619.092701254] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297619.142849847] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297619.195839205] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297619.244609172] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297619.293874121] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297619.342679295] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297619.393012918] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297619.448678313] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297619.492884034] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297619.542696973] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297619.592824863] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297619.642683509] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297619.693095345] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297619.742750157] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297619.792857044] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
[fishbot_bringup-3] [INFO] [1684297619.844838337] [fishbot_bringup]: recv odom->base_footprint tf :(-0.000050,0.000000)
数据还是一直这样,其他部分都是好的,只有小车自动导航这里不行,移动小车数据不变,然后另一个中断返回值是这样的:
-
@1683127550 这个数据不太正常,检查小车线有没有松,能不能键盘控制移动
-
此回复已被删除! -
@小鱼 雷达和里程计测试通过,所有线都没有松动,现在数据是这样的
用键盘控制小车,第一张图中数据发生改变

但是小车自动导航的还是不行
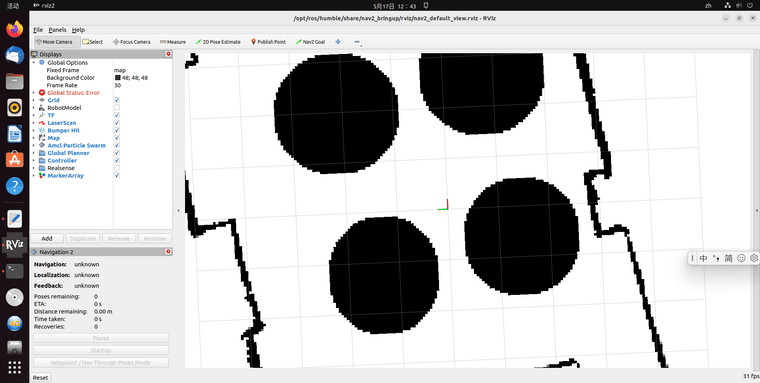
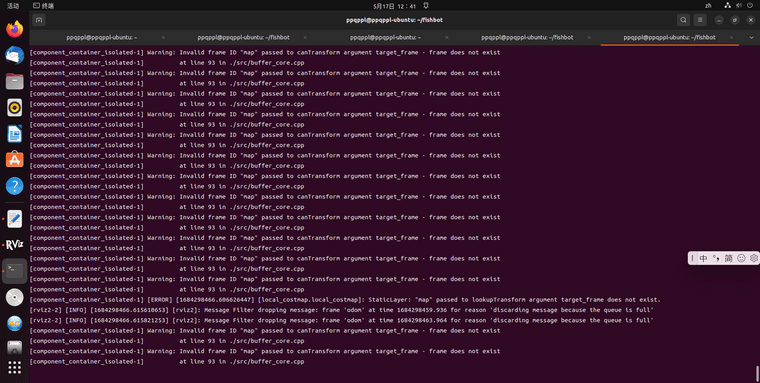
这里我点了 2D Pose Estimate 还是没有反应