ros2使用colcon编译时,总是报错提示缺少一个包,安装完一个后还有另一个
-
-
@2519105850 你用的是foxy吧
-
对的
-
@2519105850 很不幸,经过检索,你所使用的这些包应该都是没有二进制发布的,建议通过源码下载安装。
比如下面这个cpp_common,就是没有发布foxy版本。
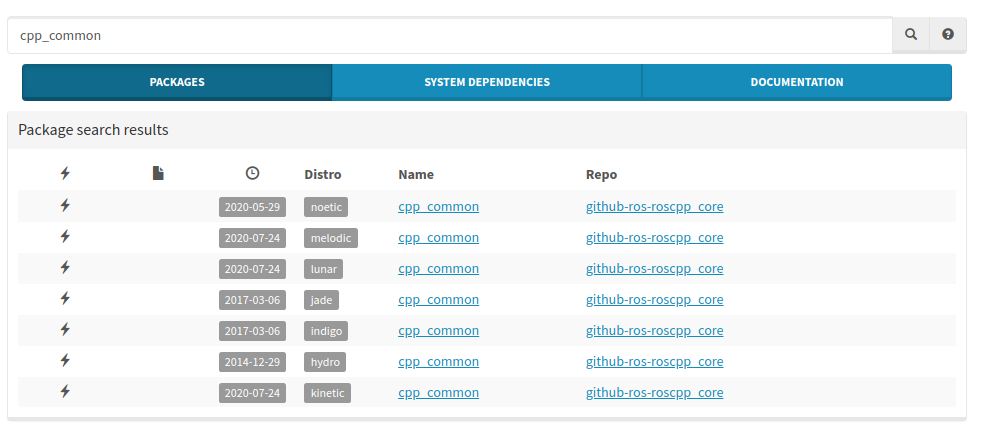
具体的包都可以到这个网站查询:
@小鱼 在 ROS/ROS2功能包在线索引网站 中说:
推荐语:可以在线搜索ROS2/ROS功能发行情况及依赖信息的网站
地址:https://index.ros.org/ -
-
@2519105850 是的,采用的是ubuntu20.04-ros:foxy实现。
-
@小鱼 好的,非常感谢!

-
 小 小鱼 将这个主题标记为已解决,在
小 小鱼 将这个主题标记为已解决,在
-
@小鱼 您好,在头一次运行colcon报错提示缺少cpp_common
CMake Warning (dev) at CMakeLists.txt:2 (project):
Policy CMP0048 is not set: project() command manages VERSION variables.
Run "cmake --help-policy CMP0048" for policy details. Use the cmake_policy
command to set the policy and suppress this warning.The following variable(s) would be set to empty:
CMAKE_PROJECT_VERSION CMAKE_PROJECT_VERSION_MAJOR CMAKE_PROJECT_VERSION_MINOR CMAKE_PROJECT_VERSION_PATCHThis warning is for project developers. Use -Wno-dev to suppress it.
CMake Error at /home/zhong/moveit2/install/message_runtime/share/message_runtime/cmake/message_runtimeConfig.cmake:197 (find_package):
Could not find a package configuration file provided by "cpp_common" with
any of the following names:cpp_commonConfig.cmake cpp_common-config.cmakeAdd the installation prefix of "cpp_common" to CMAKE_PREFIX_PATH or set
"cpp_common_DIR" to a directory containing one of the above files. If
"cpp_common" provides a separate development package or SDK, be sure it has
been installed.
Call Stack (most recent call first):
/home/zhong/moveit2/install/std_msgs/share/std_msgs/cmake/std_msgsConfig.cmake:197 (find_package)
/home/zhong/moveit2/install/catkin/share/catkin/cmake/catkinConfig.cmake:76 (find_package)
CMakeLists.txt:3 (find_package)
Failed <<< test_msgs [0.54s, exited with code 1]
Summary: 35 packages finished [8.20s]
1 package failed: test_msgs
1 package had stderr output: test_msgs
6 packages not processed我在https://github.com/chronoxor/CppCommon上下载这个包到moveit2这个文件夹里,然后又报这个错误

If a package in a merged underlay workspace is overridden and it installs headers, then all packages in the overlay must sort their include directories by workspace order. Failure to do so may result in build failures or undefined behavior at run time.
If the overridden package is used by another package in any underlay, then the overriding package in the overlay must be API and ABI compatible or undefined behavior at run time may occur.If you understand the risks and want to override a package anyways, add the following to the command line:
--allow-overriding ament_cmake ament_cmake_auto ament_cmake_core ament_cmake_gmock ament_cmake_gtest ament_cmake_pytest ament_cmake_ros ament_cmake_test rclcpp rclcpp_action rclcpp_components rclcpp_lifecycle std_msgs test_msgsThis may be promoted to an error in a future release of colcon-override-check.
Starting >>> ament_package
Starting >>> catkin
Starting >>> domain_coordinator
Starting >>> cppcommon
--- stderr: cppcommon
CMake Error: The source "/home/zhong/moveit2/CppCommon/CMakeLists.txt" does not match the source "/home/zhong/moveit2/CppCommon-master/CMakeLists.txt" used to generate cache. Re-run cmake with a different source directory.Failed <<< cppcommon [0.64s, exited with code 1]
Aborted <<< catkin [0.70s]
Aborted <<< domain_coordinator [1.32s]
Aborted <<< ament_package [1.40s]Summary: 0 packages finished [2.08s]
1 package failed: cppcommon
3 packages aborted: ament_package catkin domain_coordinator
1 package had stderr output: cppcommon
39 packages not processed运行colcon后直接就中断结束了,这个该怎样处理呢?
-
@2519105850 兄弟你先改下格式
-
@小鱼 好的,不好意思添麻烦了,下面这个格式是较正确的吗?
运行colcon命令报错提示缺少cpp_common
colcon build --cmake-args -DCMAKE_BUILD_TYPE=ReleaseCMake Warning (dev) at CMakeLists.txt:2 (project): Policy CMP0048 is not set: project() command manages VERSION variables. Run "cmake --help-policy CMP0048" for policy details. Use the cmake_policy command to set the policy and suppress this warning. The following variable(s) would be set to empty: CMAKE_PROJECT_VERSION CMAKE_PROJECT_VERSION_MAJOR CMAKE_PROJECT_VERSION_MINOR CMAKE_PROJECT_VERSION_PATCH This warning is for project developers. Use -Wno-dev to suppress it. CMake Error at /home/zhong/moveit2/install/message_runtime/share/message_runtime/cmake/message_runtimeConfig.cmake:197 (find_package): Could not find a package configuration file provided by "cpp_common" with any of the following names: cpp_commonConfig.cmake cpp_common-config.cmake Add the installation prefix of "cpp_common" to CMAKE_PREFIX_PATH or set "cpp_common_DIR" to a directory containing one of the above files. If "cpp_common" provides a separate development package or SDK, be sure it has been installed. Call Stack (most recent call first): /home/zhong/moveit2/install/std_msgs/share/std_msgs/cmake/std_msgsConfig.cmake:197 (find_package) /home/zhong/moveit2/install/catkin/share/catkin/cmake/catkinConfig.cmake:76 (find_package) CMakeLists.txt:3 (find_package) Failed <<< test_msgs [0.54s, exited with code 1] Summary: 35 packages finished [8.20s] 1 package failed: test_msgs 1 package had stderr output: test_msgs 6 packages not processed我在https://github.com/chronoxor/CppCommon上 下载cpp_common这个包到moveit2这个文件夹里,然后报了下面这个错误:
If a package in a merged underlay workspace is overridden and it installs headers, then all packages in the overlay must sort their include directories by workspace order. Failure to do so may result in build failures or undefined behavior at run time. If the overridden package is used by another package in any underlay, then the overriding package in the overlay must be API and ABI compatible or undefined behavior at run time may occur. If you understand the risks and want to override a package anyways, add the following to the command line: --allow-overriding ament_cmake ament_cmake_auto ament_cmake_core ament_cmake_gmock ament_cmake_gtest ament_cmake_pytest ament_cmake_ros ament_cmake_test rclcpp rclcpp_action rclcpp_components rclcpp_lifecycle std_msgs test_msgs This may be promoted to an error in a future release of colcon-override-check. Starting >>> ament_package Starting >>> catkin Starting >>> domain_coordinator Starting >>> cppcommon --- stderr: cppcommon CMake Error: The source "/home/zhong/moveit2/CppCommon/CMakeLists.txt" does not match the source "/home/zhong/moveit2/CppCommon-master/CMakeLists.txt" used to generate cache. Re-run cmake with a different source directory. Failed <<< cppcommon [0.64s, exited with code 1] Aborted <<< catkin [0.70s] Aborted <<< domain_coordinator [1.32s] Aborted <<< ament_package [1.40s] Summary: 0 packages finished [2.08s] 1 package failed: cppcommon 3 packages aborted: ament_package catkin domain_coordinator 1 package had stderr output: cppcommon 39 packages not processed运行colcon命令后直接就中断结束了,请问这个该怎样解决呢?
-
@2519105850 通过检索发现,cpp_common是ros的核心包 https://github.com/ros/roscpp_core 里的。
而你是ROS2,应该是不需要这个包的,请你再次确认代码版本,系统版本,ROS版本。moveit2的教程可以看看我之前写的,都是没有这个步骤和问题的。
-
@小鱼 那就说明我多半版本安装错误?
-
@2519105850 是的,你应该是代码版本不对,我刚再次检查了下我的环境,cpp_common只在ros1中有,你的代码如果是ros2的,按理不应该出现。
-
@小鱼 好的,非常感谢!!!
-
@小鱼 确实是我版本号的问题,真是太厉害了!
我运行colon命令,然后提示只要下两个包,下第二个的时候报错了
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release报错内容
CMake Error at CMakeLists.txt:19 (find_package): By not providing "Findmoveit_visual_tools.cmake" in CMAKE_MODULE_PATH this project has asked CMake to find a package configuration file provided by "moveit_visual_tools", but CMake did not find one. Could not find a package configuration file provided by "moveit_visual_tools" with any of the following names: moveit_visual_toolsConfig.cmake moveit_visual_tools-config.cmake Add the installation prefix of "moveit_visual_tools" to CMAKE_PREFIX_PATH or set "moveit_visual_tools_DIR" to a directory containing one of the above files. If "moveit_visual_tools" provides a separate development package or SDK, be sure it has been installed. --- Failed <<< moveit2_tutorials [16.1s, exited with code 1] Summary: 1 package finished [1min 24s] 1 package failed: moveit2_tutorials 1 package had stderr output: moveit2_tutorials是因为我用二进制安装moveit2没成功吗?
运行的这个代码sudo apt install ros-foxy-moveit sudo apt install ros-foxy-joint-state-controller这是结果(没报错吧)
zhong@ubuntu:~$ sudo apt install ros-foxy-moveit [sudo] zhong 的密码: 正在读取软件包列表... 完成 正在分析软件包的依赖关系树 正在读取状态信息... 完成 ros-foxy-moveit 已经是最新版 (2.2.3-1focal.20220209.173642)。 升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。 zhong@ubuntu:~$ sudo apt install ros-foxy-joint-state-controller 正在读取软件包列表... 完成 正在分析软件包的依赖关系树 正在读取状态信息... 完成 ros-foxy-joint-state-controller 已经是最新版 (0.7.0-1focal.20220223.161450)。 升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。然后我就在 https://moveit.ros.org/install-moveit2/source/ 上按照步骤运行
运行到下面这一步时报错了,但是我接着运行后面一步没有管它
zhong@ubuntu:~/ws_moveit2/src$ vcs import < moveit2/moveit2.repos Command 'vcs' not found, but there are 15 similar ones.当运行下面这个命令时,
colcon build --event-handlers desktop_notification- status- --cmake-args -DCMAKE_BUILD_TYPE=Release报了这个错误
--- stderr: moveit_planners_ompl c++: fatal error: 已杀死 signal terminated program cc1plus compilation terminated. make[2]: *** [ompl_interface/CMakeFiles/moveit_ompl_interface.dir/build.make:284:ompl_interface/CMakeFiles/moveit_ompl_interface.dir/src/detail/constrained_sampler.cpp.o] 错误 1 make[1]: *** [CMakeFiles/Makefile2:187:ompl_interface/CMakeFiles/moveit_ompl_interface.dir/all] 错误 2 make: *** [Makefile:141:all] 错误 2 --- Failed <<< moveit_planners_ompl [6min 9s, exited with code 2] Aborted <<< moveit_ros_move_group [5min 26s] Summary: 14 packages finished [8min 33s] 1 package failed: moveit_planners_ompl 1 package aborted: moveit_ros_move_group 1 package had stderr output: moveit_planners_ompl 10 packages not processed -
@2519105850 在 ros2使用colcon编译时,总是报错提示缺少一个包,安装完一个后还有另一个 中说:
Command 'vcs' not found, but there are 15 similar ones.
你去看一下我的教程,你这个连vcs都没装怎么用
-
@小鱼 我现在发现好像是我rosdepc这一步错了导致 colcon错误
rosdepc install -r --from-paths . --ignore-src --rosdistro $ROS_DISTRO -y运行这一步时报了 moveit_visual_tools 相关的错误(之前几次没显示这个错误)
ERROR: the following packages/stacks could not have their rosdepc keys resolved to system dependencies: moveit2_tutorials: Cannot locate rosdep definition for [moveit_visual_tools] Continuing to install resolvable dependencies... #All required rosdeps installed successfully之前就只有成功那句
另外运行这句指令时,报了这个错误
git reset 59cf8c49bb309e2bb7f06e295f87efa36f8bb506 --hard fatal: 不能解析对象 '59cf8c49bb309e2bb7f06e295f87efa36f8bb506'。 -
@2519105850 在 ros2使用colcon编译时,总是报错提示缺少一个包,安装完一个后还有另一个 中说:
moveit_visual_tools
rosdep这个没关系,手动下载一下到src下
git clone https://github.com/ros-planning/moveit_visual_tools.git -b foxy -
@小鱼 感觉又和之前那样
src目录下了moveit_visual_tools包后,再运行下面这个代码
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release提示我graph这个包没有,在 https://github.com/PickNikRobotics/graph_msgs.git 上下载包到src目录下再运行 colcon命令
然后提示缺少catkin
--- stderr: graph_msgs CMake Error at CMakeLists.txt:7 (find_package): By not providing "Findcatkin.cmake" in CMAKE_MODULE_PATH this project has asked CMake to find a package configuration file provided by "catkin", but CMake did not find one. Could not find a package configuration file provided by "catkin" with any of the following names: catkinConfig.cmake catkin-config.cmake Add the installation prefix of "catkin" to CMAKE_PREFIX_PATH or set "catkin_DIR" to a directory containing one of the above files. If "catkin" provides a separate development package or SDK, be sure it has been installed.我在 https://index.ros.org/ 搜索 cakin 也没找到foxy下的包,catkin也是ros1的包吧?

-
@2519105850 应该是的,你的代码到底哪来的