小鱼的一键安装系列
-
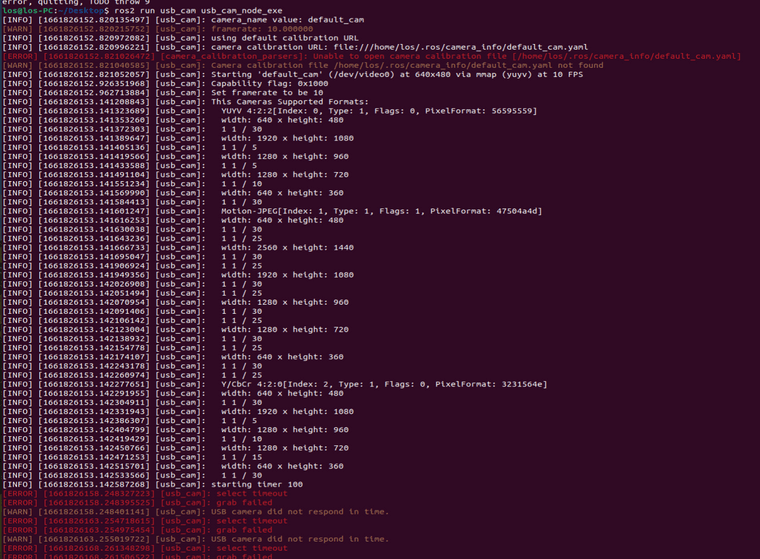 你好,配置系统内部的相机的时候输入这样的代码“ros2 run usb_cam usb_cam_node_exe”为什么会一直报错啊?
你好,配置系统内部的相机的时候输入这样的代码“ros2 run usb_cam usb_cam_node_exe”为什么会一直报错啊? -
apt更新失败,后续程序可能会继续尝试...,['\n', 'WARNING: apt does not have a stable CLI interface. Use with caution in scripts.\n', '\n', 'W: GPG 错误:https://packages.ros.org/ros/ubuntu bionic InRelease: 由于没有公钥,无法验证下列签名: NO_PUBKEY F42ED6FBAB17C654\n', 'E: 仓库 “https://packages.ros.org/ros/ubuntu bionic InRelease” 没有数字签名。\n', 'W: GPG 错误:https://packages.ros.org/ros2/ubuntu bionic InRelease: 由于没有公钥,无法验证下列签名: NO_PUBKEY F42ED6FBAB17C654\n', 'E: 仓库 “https://packages.ros.org/ros2/ubuntu bionic InRelease” 没有数字签名。\n']
四次换源后都失败了,请及时联系小鱼获取解决方案并处理!
Run CMD Task:[sudo apt-cache search ros-base ]
[-]Result:success e development metapackageKerberosRun CMD Task:[ls /opt/ros/False/setup.bash]
[-]Result:code:2安装失败了,请打开鱼香社区:https://fishros.org.cn/forum 在一键安装专区反馈问题...
Run CMD Task:[ls /opt/ros/False/setup.bash]
[-]Result:code:2 -
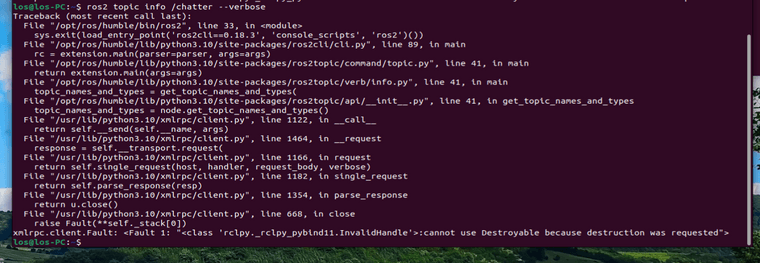 在命令行中配置DDS,输入“ros2 topic info /chatter --verbose”代码为什么会报这样的错误?
在命令行中配置DDS,输入“ros2 topic info /chatter --verbose”代码为什么会报这样的错误? -
Ubuntu16.04 多次换源失败....还有办法吗?
*apt更新失败,后续程序可能会继续尝试...,['\n', 'WARNING: apt does not have a stable CLI interface. Use with caution in scripts.\n', '\n', "E: The repository 'https://packages.ros.org/ros/ubuntu xenial Release' does not have a Release file.\n", "E: The repository 'https://packages.ros.org/ros2/ubuntu xenial Release' does not have a Release file.\n"]
四次换源后都失败了,请及时联系小鱼获取解决方案并处理!
Run CMD Task:[sudo apt-cache search ros-base ]
[-]Result:success e development metapackageKerberosRun CMD Task:[ls /opt/ros/False/setup.bash]
[-]Result:code:2安装失败了,请打开鱼香社区:https://fishros.org.cn/forum 在一键安装专区反馈问题...
Run CMD Task:[ls /opt/ros/False/setup.bash]
[-]Result:code:2* -
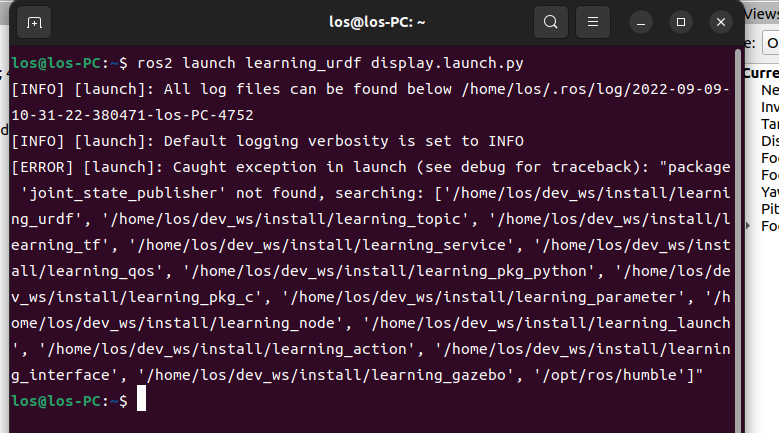 你好,请问启动机器人这样报错该怎么做啊?
你好,请问启动机器人这样报错该怎么做啊? -
@LOS 前面rosdepc指令用错了应该是,你可以手动安装一下缺少的包
-
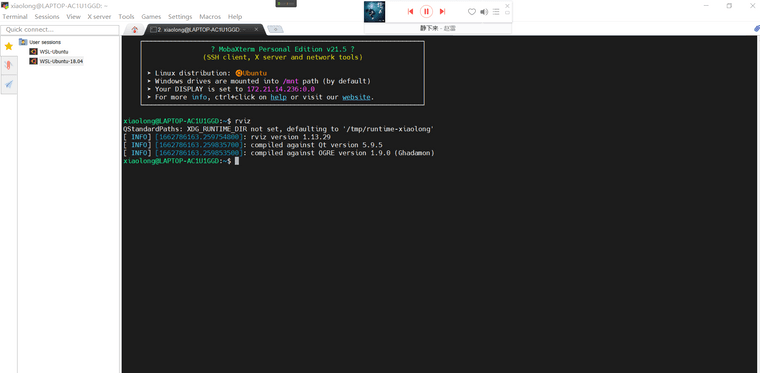
安装完成后小乌龟不能动,rviz启动不了
-
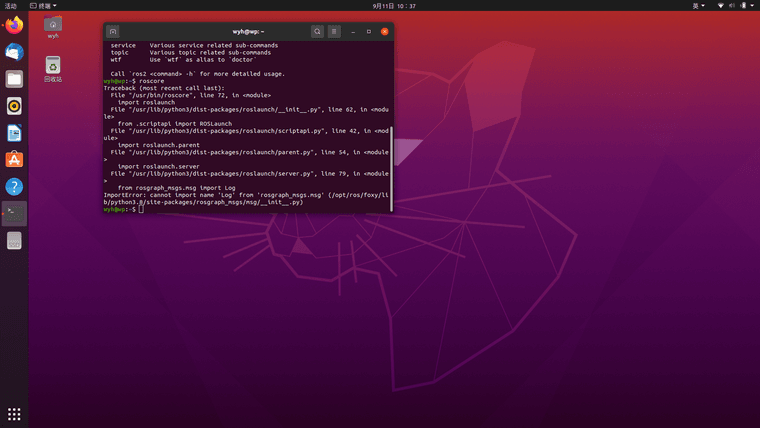
为什么roscore缺失 如何解决呢 -
小鱼,为什么安装好微信(桌面版),点击没反应呢?
-
@阔野 桌面版有bug,建议换dcker版本
-
@小鱼 安装好docker版的后,运行微信它说微信版本太低需要升级,然后点确定 微信界面就一直“正在登陆...." 这种情况怎么解决呢?
-
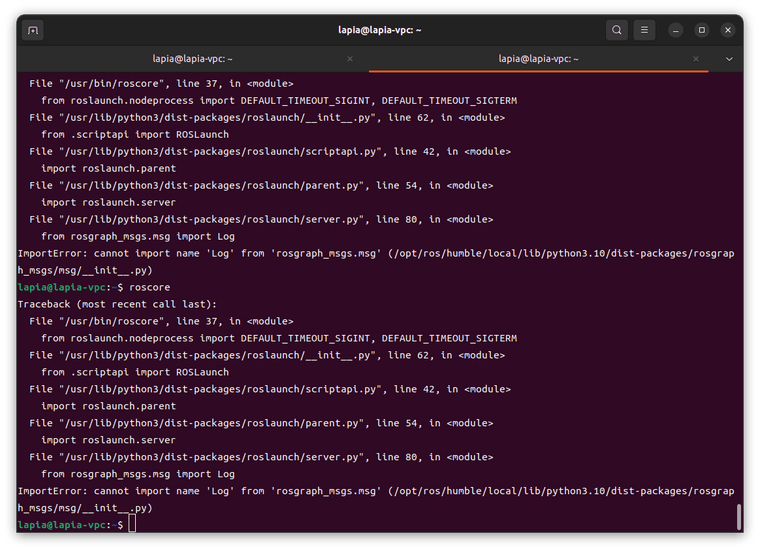
roscore启动不了该怎么解决 -
Run CMD Task:[sudo apt-cache search aptitude ]
[-]Result:successTraceback (most recent call last):
File "/tmp/fishinstall/install.py", line 88, in <module>
main()
File "/tmp/fishinstall/install.py", line 81, in main
run_tool_file(tools[code]['tool'].replace(url_prefix,'').replace("/","."))
File "/tmp/fishinstall/tools/base.py", line 1222, in run_tool_file
if tool.run()==False: return False
File "/tmp/fishinstall/tools/tool_install_ros.py", line 385, in run
self.install_ros()
File "/tmp/fishinstall/tools/tool_install_ros.py", line 378, in install_ros
ros_version = self.choose_and_install_ros()
File "/tmp/fishinstall/tools/tool_install_ros.py", line 319, in choose_and_install_ros
AptUtils.install_pkg('aptitude')
File "/tmp/fishinstall/tools/base.py", line 1161, in install_pkg
for key in dic.keys():
AttributeError: 'NoneType' object has no attribute 'keys' -
您好,为什么ros1啊,只有ros2,我是20.04的乌班图
RUN Choose Task:[请输入括号内的数字]
请选择你要安装的ROS版本名称(请注意ROS1和ROS2区别):
[1]:humble(ROS2)
[2]:rolling(ROS2)
[0]:quit
请输入[]内的数字以选择:3
请输入[]内的数字以选择: -
此回复已被删除! -
@半壁 请单独发一个新帖子并附上日志信息
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
1.使用明确的问题标题
好的标题:一键安装后 进不去图形操作系统(能让人一眼看出问题)
不好的标题(看到后感觉莫名其妙不想回答):
ssh远程登录(远程登录怎么了?)
ROS安装错误(不说什么错误)- 不要截图,要复制粘贴,一定要代码块包裹
不要截图的原因是,代码方便回答者去复制帮你搜索,而且无论是在手机上还是电脑上都更容易看。
用代码块包裹是为了更加美观,不会一个代码很长一段,不易阅读 - 尽量提供更多的信息(大多数问题不是别人不知道如何解决,而是不知道你的问题是什么)
即使再厉害的大佬,也不能通过你的一句话帮你定位出问题,提出解决方案。
如果是程序,版本信息,系统信息,ROS版本,你的前后操作等等都是帮助快速定位的。
4.如何添加话题
编辑话题在编辑页面左下方
- 不要截图,要复制粘贴,一定要代码块包裹
-
@云天明 你搞错了,你的系统时ubuntu22.04
-
@小鱼 不好意思,是我看错了,谢谢
-

你好,系统是ubuntu18.04,在一键安装ros,检测出依赖有问题后,先按n后按y后,出现此问题,我应该如何解决?
-
@半壁 可以多试几次,比如
y
n ,y
n,n,y
n,n,n,y