[FishBotCamera]3.结合YOLO实现检测
-
@小鱼 小鱼老师,我检查了驱动,显示的有帧率,也有视频图像,但就是看不到检测结果,请问是怎么回事?
-
@ros2_fresh 看看是否有报错的地方,node graph 连接是否正常
-
@小鱼 换了个文件夹,重新编译就好了。可能是编译的问题,
-
@小鱼 header:
stamp:
sec: 1740455780
nanosec: 215156274
frame_id: camera
detections:- header:
stamp:
sec: 0
nanosec: 0
frame_id: ''
results:- hypothesis:
class_id: chair
score: 0.5549157857894897
pose:
pose:
position:
x: -0.15733063741351616
y: -0.26011998719034674
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
covariance:- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
- 0.0
bbox:
center:
x: 325.5
y: 276.5
theta: 0.0
size_x: 95.0
size_y: 53.0
id: chair
- hypothesis:
这是我运行得到的结果,我希望可以通过话题中‘position’引导机器人运动,可否解释下这个坐标的具体计算方式?
- header:
-
lwb@Lwb:~$ cd ~/fishbot_ws/
colcon build
source install/setup.bash
Starting >>> yolov5_ros2
/home/lwb/.local/lib/python3.10/site-packages/setuptools/_distutils/dist.py:270: UserWarning: Unknown distribution option: 'tests_require'
warnings.warn(msg)
[0.351s] WARNING:colcon.colcon_ros.task.ament_python.build:Package 'yolov5_ros2' doesn't explicitly install a marker in the package index (colcon-ros currently does it implicitly but that fallback will be removed in the future)
--- stderr: yolov5_ros2
/home/lwb/.local/lib/python3.10/site-packages/setuptools/_distutils/dist.py:270: UserWarning: Unknown distribution option: 'tests_require'
warnings.warn(msg)
Traceback (most recent call last):
File "/home/lwb/fishbot_ws/src/yolov5_ros2/setup.py", line 7, in <module>
setup(
File "/home/lwb/.local/lib/python3.10/site-packages/setuptools/init.py", line 117, in setup
return distutils.core.setup(**attrs)
File "/home/lwb/.local/lib/python3.10/site-packages/setuptools/_distutils/core.py", line 186, in setup
return run_commands(dist)
File "/home/lwb/.local/lib/python3.10/site-packages/setuptools/_distutils/core.py", line 202, in run_commands
dist.run_commands()
File "/home/lwb/.local/lib/python3.10/site-packages/setuptools/_distutils/dist.py", line 983, in run_commands
self.run_command(cmd)
File "/home/lwb/.local/lib/python3.10/site-packages/setuptools/dist.py", line 999, in run_command
super().run_command(command)
File "/home/lwb/.local/lib/python3.10/site-packages/setuptools/_distutils/dist.py", line 1002, in run_command
cmd_obj.run()
File "/home/lwb/.local/lib/python3.10/site-packages/setuptools/command/egg_info.py", line 312, in run
self.find_sources()
File "/home/lwb/.local/lib/python3.10/site-packages/setuptools/command/egg_info.py", line 320, in find_sources
mm.run()
File "/home/lwb/.local/lib/python3.10/site-packages/setuptools/command/egg_info.py", line 548, in run
self.prune_file_list()
File "/home/lwb/.local/lib/python3.10/site-packages/setuptools/command/sdist.py", line 162, in prune_file_list
super().prune_file_list()
File "/home/lwb/.local/lib/python3.10/site-packages/setuptools/_distutils/command/sdist.py", line 380, in prune_file_list
base_dir = self.distribution.get_fullname()
File "/home/lwb/.local/lib/python3.10/site-packages/setuptools/_core_metadata.py", line 272, in get_fullname
return _distribution_fullname(self.get_name(), self.get_version())
File "/home/lwb/.local/lib/python3.10/site-packages/setuptools/_core_metadata.py", line 290, in _distribution_fullname
canonicalize_version(version, strip_trailing_zero=False),
TypeError: canonicalize_version() got an unexpected keyword argument 'strip_trailing_zero'Failed <<< yolov5_ros2 [0.84s, exited with code 1]
Summary: 0 packages finished [0.96s]
1 package failed: yolov5_ros2
1 package had stderr output: yolov5_ros2
lwb@Lwb:~/fishbot_ws$ ros2 run yolov5_ros2 yolo_detect_2d --ros-args -p device:=cpu -p image_topic:=/fishbot_camera_raw
Package 'yolov5_ros2' not found
编译时报错,yolov5已安装,前面的步骤没有问题 -
@小鱼 在 [FishBotCamera]3.结合YOLO实现检测 中说:
pub_result_img:=True
这个代码默认是物体检测,我想用这个yolo5来实现色块识别并控制fishbot跟踪要怎样实现
-
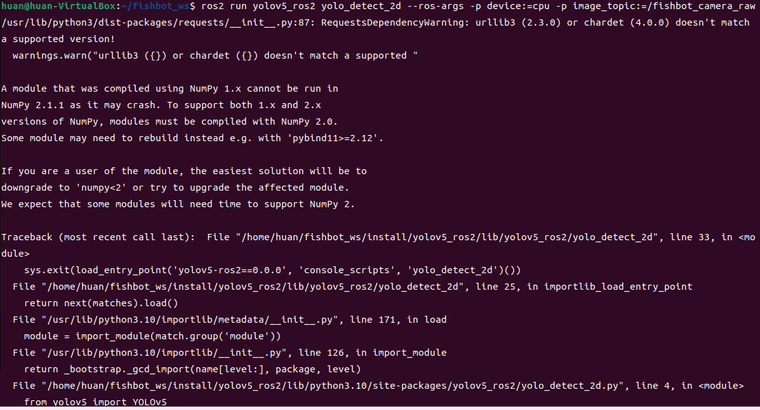
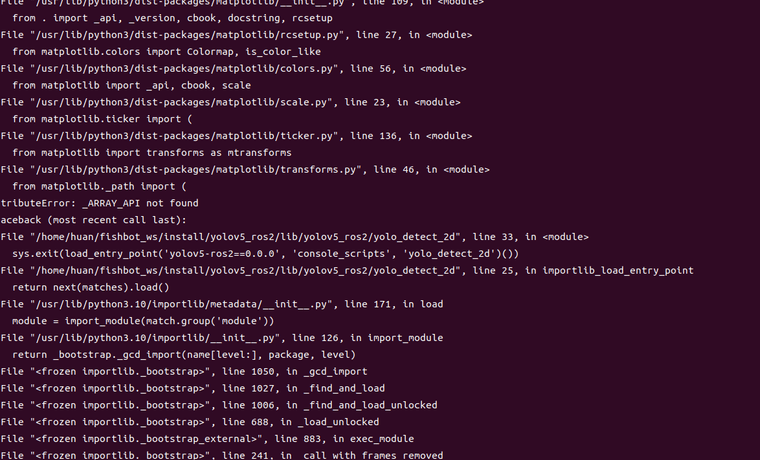
 大佬,执行以上步骤的时候出现下图问题怎么办?
大佬,执行以上步骤的时候出现下图问题怎么办? -
@2652794104 把右边终端的所有日志复制粘贴出来看看
-
-
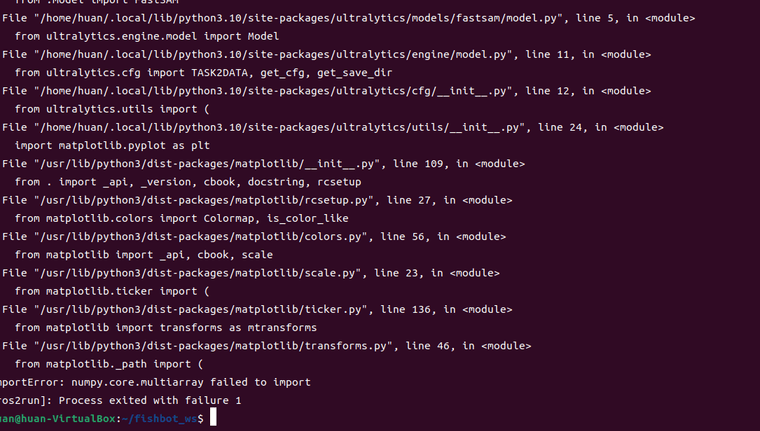
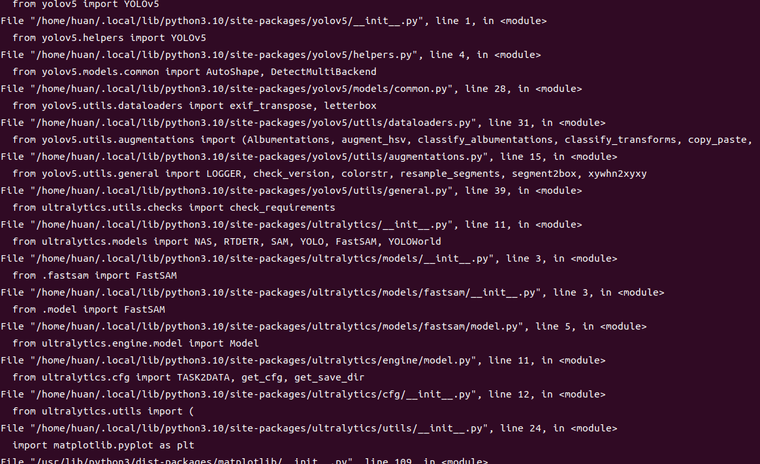
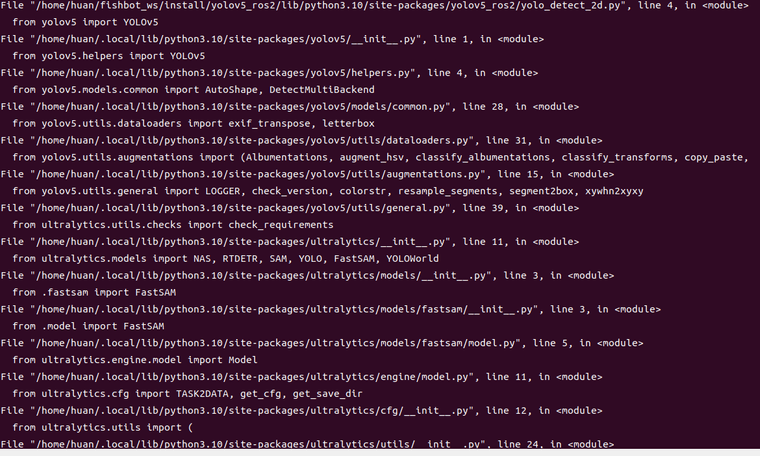
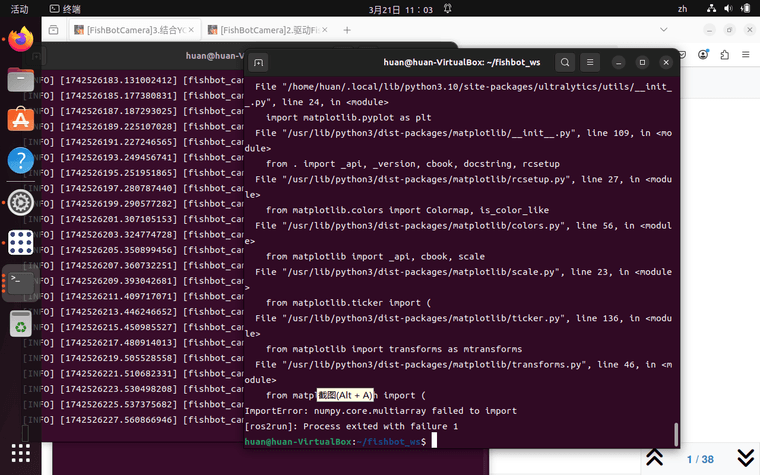
@2652794104 感觉你电脑yolo没安装好
-
@小鱼 但卸载后重新安装了还是不行,我在Ubuntu终端的情况如下VirtualBox:~/fishbot_ws/src$ cd ~/fishbot_ws/ colcon build source install/setup.bash Starting >>> fishbot_camera Starting >>> yolov5_ros2 /home/huan/.local/lib/python3.10/site-packages/setuptools/_distutils/dist.py:289: UserWarning: Unknown distribution option: 'tests_require' warnings.warn(msg) /home/huan/.local/lib/python3.10/site-packages/setuptools/_distutils/dist.py:289: UserWarning: Unknown distribution option: 'tests_require' warnings.warn(msg) [0.584s] WARNING:colcon.colcon_ros.task.ament_python.build:Package 'yolov5_ros2' doesn't explicitly install a marker in the package index (colcon-ros currently does it implicitly but that fallback will be removed in the future) --- stderr: yolov5_ros2 /home/huan/.local/lib/python3.10/site-packages/setuptools/_distutils/dist.py:289: UserWarning: Unknown distribution option: 'tests_require' warnings.warn(msg) Traceback (most recent call last): File "/home/huan/fishbot_ws/src/yolov5_ros2/setup.py", line 7, in <module> setup( File "/home/huan/.local/lib/python3.10/site-packages/setuptools/init.py", line 117, in setup return distutils.core.setup(**attrs) File "/home/huan/.local/lib/python3.10/site-packages/setuptools/_distutils/core.py", line 186, in setup return run_commands(dist) File "/home/huan/.local/lib/python3.10/site-packages/setuptools/_distutils/core.py", line 202, in run_commands dist.run_commands() File "/home/huan/.local/lib/python3.10/site-packages/setuptools/_distutils/dist.py", line 1002, in run_commands self.run_command(cmd) File "/home/huan/.local/lib/python3.10/site-packages/setuptools/dist.py", line 1104, in run_command super().run_command(command) File "/home/huan/.local/lib/python3.10/site-packages/setuptools/_distutils/dist.py", line 1021, in run_command cmd_obj.run() File "/home/huan/.local/lib/python3.10/site-packages/setuptools/command/egg_info.py", line 312, in run self.find_sources() File "/home/huan/.local/lib/python3.10/site-packages/setuptools/command/egg_info.py", line 320, in find_sources mm.run
-
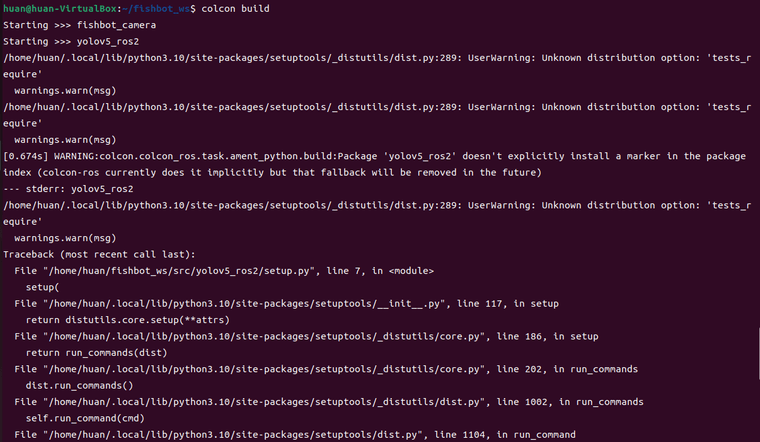
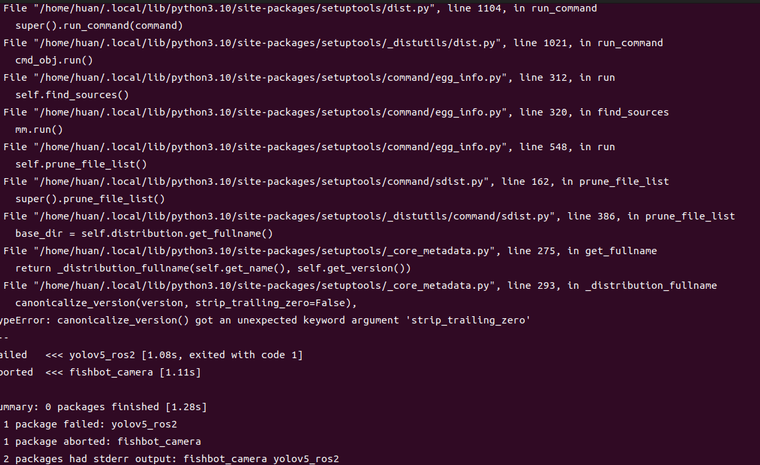 在执行colcon build的这一步时候出现以下报错该如何处理
在执行colcon build的这一步时候出现以下报错该如何处理 -
@2652794104 是不是 setup 的版本有问题
-
@2652794104 编译其他功能包会这样子吗
-
@小鱼 编译其他功能包好像没出现类似的
-
@2652794104 日志看起来很奇怪,换台电脑试试可以不可以编译
-
-
@小鱼 谢谢大佬,解决了
-
小鱼,这个用CPU会有点卡,可以用GPU吗,启动时代码改成gpu好像显示只能用cpu或者跳过
-
@2431039560 这个要看yolo那边的了