-
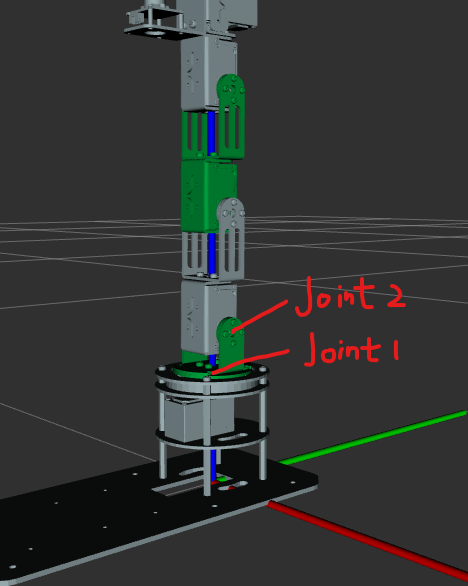
举例,这张图所示的机械臂模型,其关节joint1和joint2如图所示,他们的urdf文件内的origin xyz坐标参数分别是:(Fixed Frame设定的是机械臂底下第一个连杆)
joint1:<origin xyz="0 0 0.06605" rpy="-0.010805 0 0" />
joint2:<origin xyz="0 -0.00031873 0.04145" rpy="0 1.5708 0" />看辽半天没搞明白这个origin xyz参数是基于哪个坐标轴来写的(怎么z值越往上越小),还有在y方向上为什么有负值呢,请教各位大佬讲解一下,感谢感谢
-
joint 里面的 origin 坐标系,是由对应joint 目标位置决定的。
也就是外面一个 link 的坐标系。
-
@altair-albert 请问外面一个link是指哪一个link哦,感谢感谢
-
@363228894 就是parent 对应的link.
-
@363228894 移动安装父连杆坐标系进行标定,先把父坐标系找出来,按着推就好
-
Y young 将这个主题标记为已解决,在