ORB_SLAM2编译报错,用遍了网上的方法都不行,谁给指点一下
-
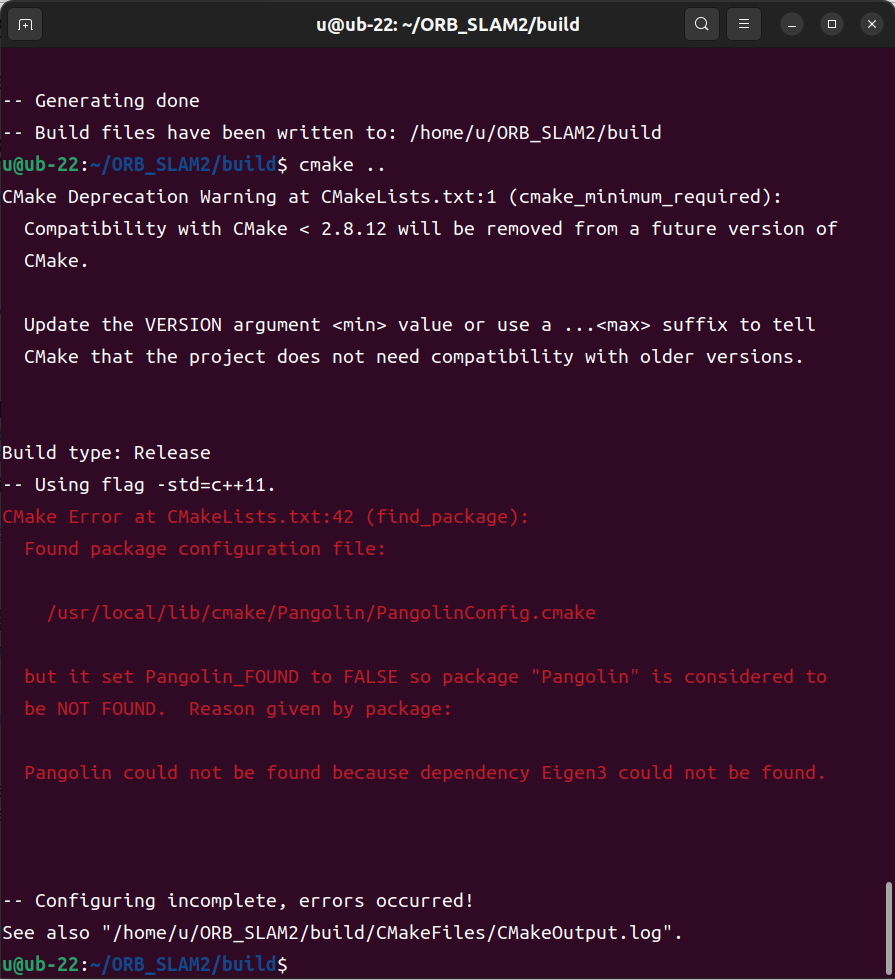
@Lorry Eigen3 3.4.0 Pangolin按好几个博主的方法安装了好几遍,就是编译通过不了,应该就是这里有问题,
find_package(Eigen3 3 REQUIRED) find_package(Pangolin REQUIRED) include_directories( ${PROJECT_SOURCE_DIR} ${PROJECT_SOURCE_DIR}/include ${EIGEN3_INCLUDE_DIR} ${Pangolin_INCLUDE_DIRS} )也按照好几个博主的改了,就是不行,找不到Eigen3::Eigen
-
@Lorry 我试试看,谢谢
-
@毛哥成山轮胎机油保养 如果你安装过了,你看看你电脑有没有
/lib/cmake/eigen3这个路径,路径里有没有Eigen3Config.cmake的文件 -
@Lorry

按这个博主的方法安装的
https://blog.csdn.net/qq_45401419/article/details/118358687
一切都和他写的一样,但是/lib/cmake/eigen3这个路径,路径里有没有Eigen3Config.cmake文件
实在编译过不了,我先学习一下orb_slam代码,等熟悉了代码在想办法编译 -
@毛哥成山轮胎机油保养 eigen3编译完成后需要安装的
sudo make install这样才会把编译完成的库文件安装到系统目录,cmake才会找到。
另外,eigen3添加引用时,你可以尝试将Eigen改为eigen3/Eigen -
@Lorry
ubuntu22.04 ros2 humble版应该是太新了,好多软件都不合适,毕竟这是六七年前的开源程序了 -
@毛哥成山轮胎机油保养 是的了,可以回退下版本,或者试试docker(不过又要折腾挺长时间)
-
@小鱼 搞了两三天了,Cmakelists.txt Makefile学了好几遍了,自己的Cmakelists.txt也改了好多次 就是不行呀,坑真深
-
毛 毛哥成山轮胎机油保养 将这个主题标记为已解决,在
-
ORB_SLAM2时间太久了,现在的软件环境很难适配,安装ORB_SLAM3容易一点.
-
哈哈哈,这个问题,我解决了,方法如下:
在CMakeLists.txt中,将
find_package(Eigen3 3.1.0 REQUIRED)替换为
list(APPEND CMAKE_INCLUDE_PATH "/usr/local/include")
find_package (Eigen3 3.3 REQUIRED NO_MODULE)