[FishBot教程] 9.0.3. 主控板固件烧录与配置
-
@小鱼 好的我去要一下
-
 这是原因 有什么办法解决吗
这是原因 有什么办法解决吗 -
-
@2267570370 应该是ttyUSB0
-
没有数据闪动,前面都是正常的,我打开话题也什么都没有,怎么办@小鱼 -
@wushengxin 网络问题,找客服要下网络结构视频,先学习一波
-

串口占用怎么办@小鱼 -
@wushengxin 看教程第一部分友情提示
-
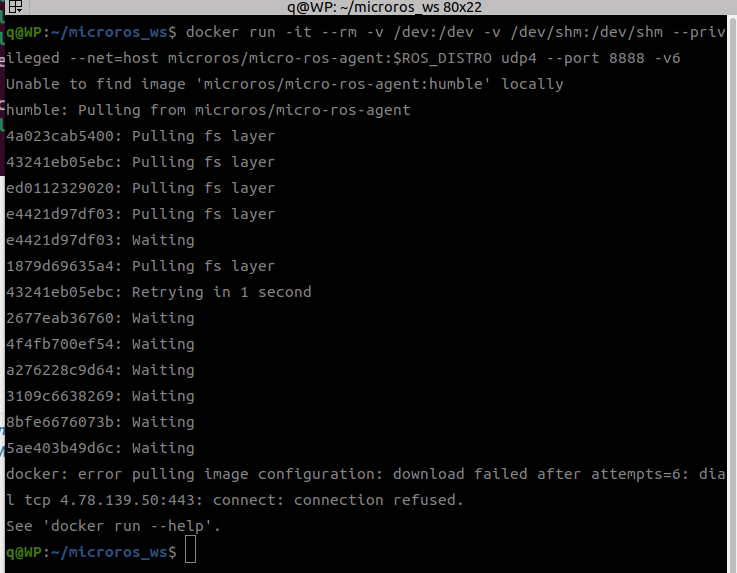
四驱车更新固件,执行docker出现错误 -
@nxuldm 非常常见的错误,右上角直接搜
-
 试了好久这里就是连不上
试了好久这里就是连不上 -
此回复已被删除! -
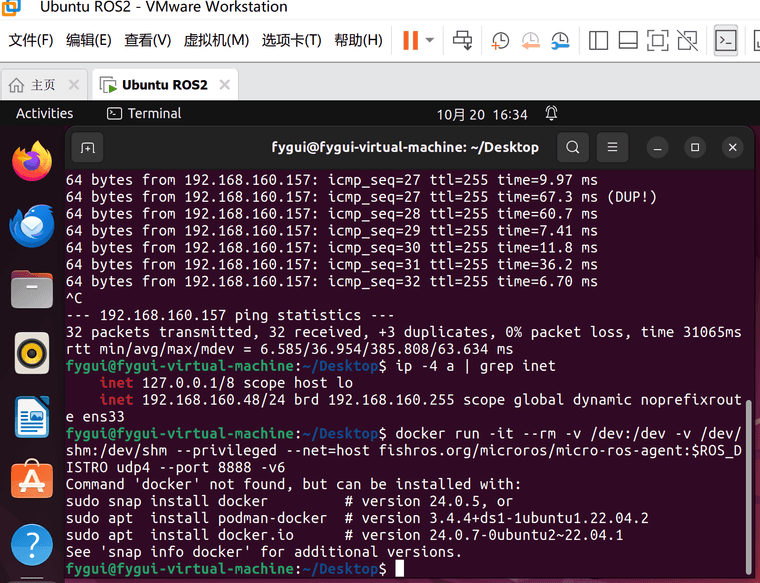
@zwz2003 zwz@zwz-virtual-machine:~$ docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host fishros.org/microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6
Unable to find image 'fishros.org/microros/micro-ros-agent:humble' locally
docker: Error response from daemon: Head "https://fishros.org/v2/microros/micro-ros-agent/manifests/humble": Get "https://auth.docker.io/token?scope=repository%3Amicroros%2Fmicro-ros-agent%3Apull&service=registry.docker.io": net/http: request canceled while waiting for connection (Client.Timeout exceeded while awaiting headers).
See 'docker run --help'.
zwz@zwz-virtual-machine:~$ docker pull ubuntu:22.04
22.04: Pulling from library/ubuntu
6414378b6477: Pull complete
Digest: sha256:58b87898e82351c6cf9cf5b9f3c20257bb9e2dcf33af051e12ce532d7f94e3fe
Status: Downloaded newer image for ubuntu:22.04
docker.io/library/ubuntu:22.04
后续我更换代理,还是没有用,但是拉镜像是好的 -
@zwz2003 多试几次,还不行就一键安装选17,更换几个代理
-
此回复已被删除! -
小鱼您好,我是用的是ubuntu22.04 humble版本。
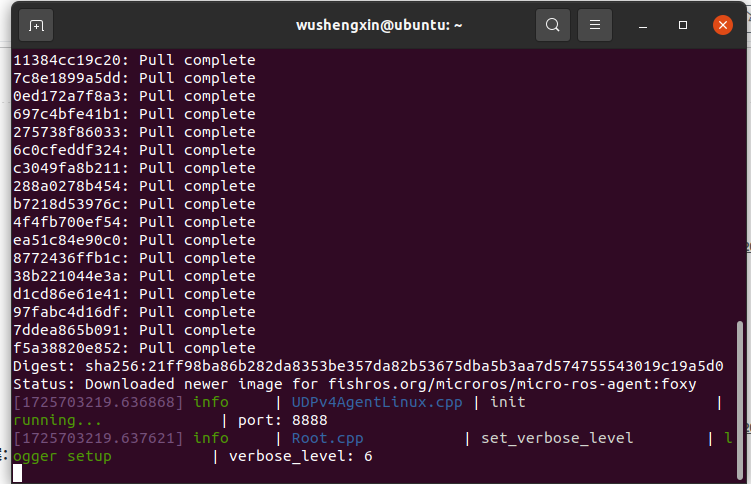
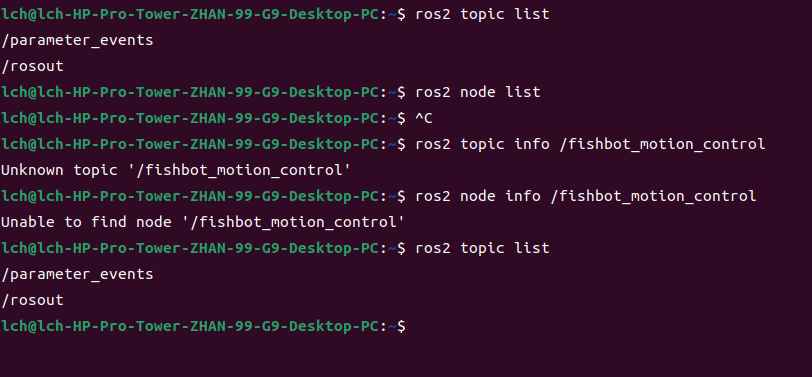
我进行到“输入ros2 topic list,fishbot相关话题就出来了”这一步时,无法查找到fishbot的相关话题(如图1所示),在上一步通信过程中,也看到了不断有数据提示,已经通信上了(如图2所示)。仍然出现这个问题,想请问应该如何解决?
-
@1020080005 用的udp协议吗,什么网络结构,通信质量怎么样
-
@小鱼 在 [FishBot教程] 3. 主控板固件烧录与配置 中说:
什么网络结构,通信质量怎么样
用的是udp协议,通信质量好。
多次查找后是用了“串口USB永久权限设置”这篇文章的代码得以解决,即:
sudo chmod 666 /dev/ttyUSB0
或者sudo usermod -aG dialoutwhoami -
此回复已被删除! -
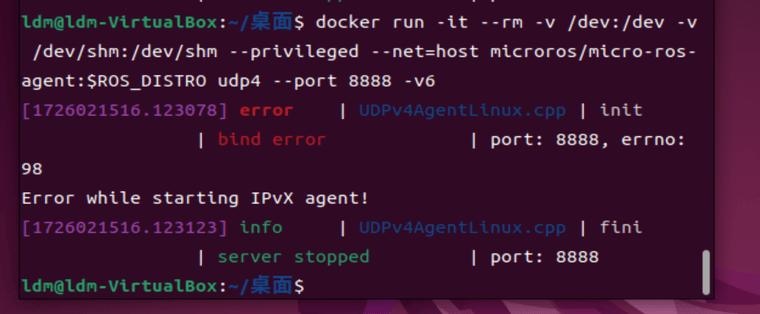
@小鱼 我在做教程3主板固件烧录与配置过程中,用Windows版本的配置助手成功烧录了运动控制板的固件并配置好了网络(手机热点,在宿舍条件有限,宿舍网线出口接路由器也是校园网)能ping通。在配置MicroRos服务时用虚拟机查看了网络IP配置了udpserver_ip,然后在虚拟机上执行了docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6后没有正常运行
然后我又尝试了1.2节下载docker拉取镜像也没有成功