[FishBot教程]9.0.4.使用ROS2键盘控制FishBot
-
@andrew_liumuran 重启之电脑后打开再microros就可以了把 我是这么解决的
-
前面的键盘控制功能都是好的,但是启动rviz2时报错,启动界面闪退,请问下是什么原因?
sszb-wan@sszb-2:/mnt/c/WINDOWS/system32$ rviz2
QStandardPaths: wrong permissions on runtime directory /run/user/1000/, 0755 instead of 0700
Segmentation fault (core dumped) -
@591259845 哈喽,问一下解决办法
-
-
小鱼,请问在执行这条运行agent的指令时:sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6,请问这个micro-ros-agent镜像是通过docker在线下载并运行的,还是之前就已经下载好的镜像然后通过docker运行下而已?一直没看懂这个agent镜像怎么来的,如果在线的方式的仅仅通过microros/micro-ros-agent这个镜像名就可以定位到这个吗?这个是通用的官方文件是吧??
-
@pst 有一个网站叫 docker hub
-
@andrew_liumuran +1求解决
-
小鱼您好,我在运行
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6指令时,一旦我用新的终端窗口跑指令,原本的窗口就会出现以下报错
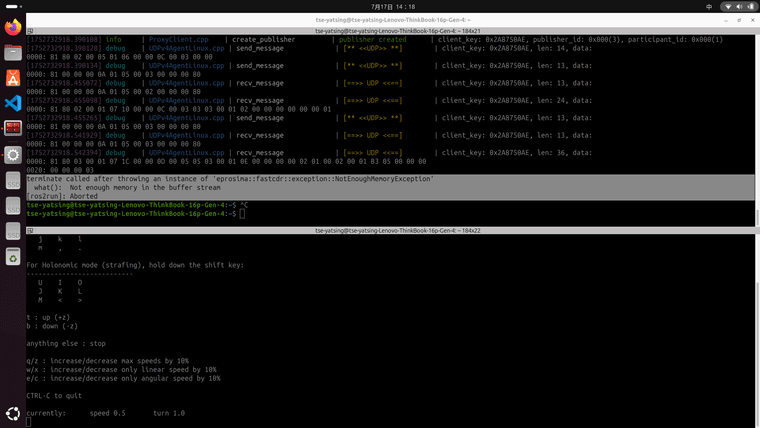
terminate called after throwing an instance of 'eprosima::fastcdr::exception::NotEnoughMemoryException' what(): Not enough memory in the buffer stream [ros2run]: Aborted请求小鱼帮一下解决问题
-
-
您好,我在笔记本的Ubuntu 24.04.1 LTS双系统上运行9.0.4,但每次开新的终端跑键盘,原本接收数据的终端就会内存泄漏。麻烦小鱼或其他大佬帮忙看看问题回复,在此非常感谢! -
@小鱼
Ubuntu 24.04.1 LTS开终端
docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host registry.cn-hangzhou.aliyuncs.com/fishros/micro-ros-agent:humble udp4 --port 8888 -v6
开新终端
ros2 run teleop_twist_keyboard teleop_twist_keyboard原终端
[1752732918.127213] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x2A8750AE, topic_id: 0x000(2), participant_id: 0x000(1) [1752732918.127246] debug | UDPv4AgentLinux.cpp | send_message | [** <<UDP>> **] | client_key: 0x2A8750AE, len: 14, data: 0000: 81 80 01 00 05 01 06 00 00 0B 00 02 00 00 [1752732918.127253] debug | UDPv4AgentLinux.cpp | send_message | [** <<UDP>> **] | client_key: 0x2A8750AE, len: 13, data: 0000: 81 00 00 00 0A 01 05 00 02 00 00 00 80 [1752732918.164447] debug | UDPv4AgentLinux.cpp | send_message | [** <<UDP>> **] | client_key: 0x2A8750AE, len: 13, data: 0000: 81 00 00 00 0B 01 05 00 01 00 01 00 80 [1752732918.236313] debug | UDPv4AgentLinux.cpp | recv_message | [==>> UDP <<==] | client_key: 0x2A8750AE, len: 13, data: 0000: 81 00 00 00 0B 01 05 00 01 00 01 00 80 [1752732918.236517] debug | UDPv4AgentLinux.cpp | send_message | [** <<UDP>> **] | client_key: 0x2A8750AE, len: 13, data: 0000: 81 00 00 00 0A 01 05 00 02 00 00 00 80 [1752732918.364735] debug | UDPv4AgentLinux.cpp | send_message | [** <<UDP>> **] | client_key: 0x2A8750AE, len: 13, data: 0000: 81 00 00 00 0B 01 05 00 01 00 01 00 80 [1752732918.370782] debug | UDPv4AgentLinux.cpp | recv_message | [==>> UDP <<==] | client_key: 0x2A8750AE, len: 13, data: 0000: 81 00 00 00 0A 01 05 00 02 00 00 00 80 [1752732918.389860] debug | UDPv4AgentLinux.cpp | recv_message | [==>> UDP <<==] | client_key: 0x2A8750AE, len: 24, data: 0000: 81 80 02 00 01 07 10 00 00 0C 00 03 03 03 00 01 02 00 00 00 00 00 00 01 [1752732918.389890] debug | UDPv4AgentLinux.cpp | recv_message | [==>> UDP <<==] | client_key: 0x2A8750AE, len: 13, data: 0000: 81 00 00 00 0A 01 05 00 02 00 00 00 80 [1752732918.389899] debug | UDPv4AgentLinux.cpp | recv_message | [==>> UDP <<==] | client_key: 0x2A8750AE, len: 13, data: 0000: 81 00 00 00 0B 01 05 00 02 00 02 00 80 [1752732918.390052] debug | UDPv4AgentLinux.cpp | send_message | [** <<UDP>> **] | client_key: 0x2A8750AE, len: 13, data: 0000: 81 00 00 00 0A 01 05 00 02 00 00 01 80 [1752732918.390108] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x2A8750AE, publisher_id: 0x000(3), participant_id: 0x000(1) [1752732918.390128] debug | UDPv4AgentLinux.cpp | send_message | [** <<UDP>> **] | client_key: 0x2A8750AE, len: 14, data: 0000: 81 80 02 00 05 01 06 00 00 0C 00 03 00 00 [1752732918.390134] debug | UDPv4AgentLinux.cpp | send_message | [** <<UDP>> **] | client_key: 0x2A8750AE, len: 13, data: 0000: 81 00 00 00 0A 01 05 00 03 00 00 00 80 [1752732918.455072] debug | UDPv4AgentLinux.cpp | recv_message | [==>> UDP <<==] | client_key: 0x2A8750AE, len: 13, data: 0000: 81 00 00 00 0A 01 05 00 02 00 00 00 80 [1752732918.455098] debug | UDPv4AgentLinux.cpp | recv_message | [==>> UDP <<==] | client_key: 0x2A8750AE, len: 24, data: 0000: 81 80 02 00 01 07 10 00 00 0C 00 03 03 03 00 01 02 00 00 00 00 00 00 01 [1752732918.455265] debug | UDPv4AgentLinux.cpp | send_message | [** <<UDP>> **] | client_key: 0x2A8750AE, len: 13, data: 0000: 81 00 00 00 0A 01 05 00 03 00 00 00 80 [1752732918.541929] debug | UDPv4AgentLinux.cpp | recv_message | [==>> UDP <<==] | client_key: 0x2A8750AE, len: 13, data: 0000: 81 00 00 00 0A 01 05 00 03 00 00 00 80 [1752732918.542394] debug | UDPv4AgentLinux.cpp | recv_message | [==>> UDP <<==] | client_key: 0x2A8750AE, len: 36, data: 0000: 81 80 03 00 01 07 1C 00 00 0D 00 05 05 03 00 01 0E 00 00 00 00 02 01 00 02 00 01 B3 05 00 00 00 0020: 00 00 00 03 terminate called after throwing an instance of 'eprosima::fastcdr::exception::NotEnoughMemoryException' what(): Not enough memory in the buffer stream [ros2run]: Aborted新终端
This node takes keypresses from the keyboard and publishes them as Twist/TwistStamped messages. It works best with a US keyboard layout. --------------------------- Moving around: u i o j k l m , . For Holonomic mode (strafing), hold down the shift key: --------------------------- U I O J K L M < > t : up (+z) b : down (-z) anything else : stop q/z : increase/decrease max speeds by 10% w/x : increase/decrease only linear speed by 10% e/c : increase/decrease only angular speed by 10% CTRL-C to quit currently: speed 0.5 turn 1.0 -
@1115326614 请问你的问题解决了没,我也遇到的一样的问题,rviz2上改成BestEffort依然出现这个警告,并且rviz2上不显示数据
-
imu安装失败
Need to get 172 kB of archives.
After this operation, 935 kB of additional disk space will be used.
Err:1 http://packages.ros.org/ros2/ubuntu jammy/main amd64 ros-humble-rviz-imu-plugin amd64 2.1.5-1jammy.20241128.044439
404 Not Found [IP: 140.211.166.134 80]
E: Failed to fetch http://packages.ros.org/ros2/ubuntu/pool/main/r/ros-humble-rviz-imu-plugin/ros-humble-rviz-imu-plugin_2.1.5-1jammy.20241128.044439_amd64.deb 404 Not Found [IP: 140.211.166.134 80]
E: Unable to fetch some archives, maybe run apt-get update or try with --fix-missing? -
此回复已被删除!