[FishBot教程] 9.0.6. 雷达驱动及建图测试
-
@szh12031 解决了吗,网络质量如何
-
@1436893633 解决了吗?
-
@小鱼 在 [FishBot教程] 9.0.6. 雷达驱动及建图测试 中说:
xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser
-
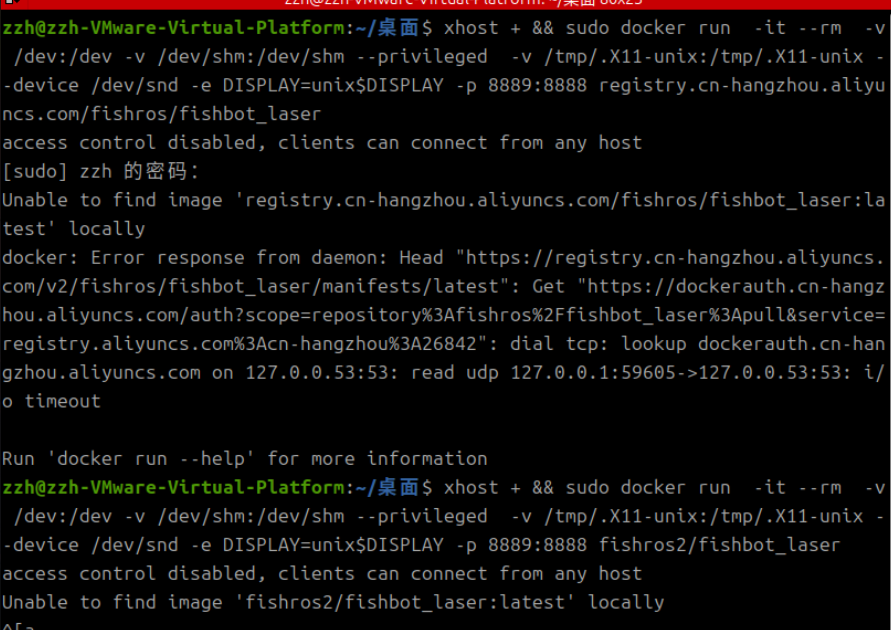 两个下载雷达驱动的命令都不行是怎么回事呀
两个下载雷达驱动的命令都不行是怎么回事呀 -
小鱼老师,我在lazzy上运行建图测试,前面都可以正常运行,但是保存地图时报错地图映射失败

-
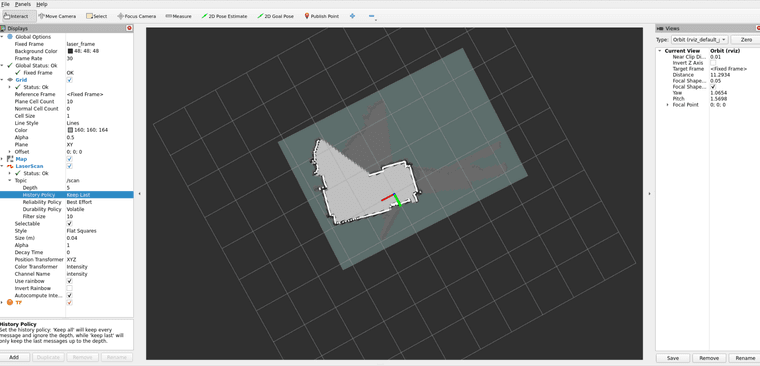
@小鱼 没有,又试了几次,还是不行呢,小车放在桌子上不动,地图就不断的扩张了。雷达驱动程序是4个菜单的版本。
-
@小鱼 网络质量是可以的,同一个WIFI下。
-
树莓派安装Ubuntu22.04通过有线方式读雷达数据一直报绑定不上串口驱动
报错如下图
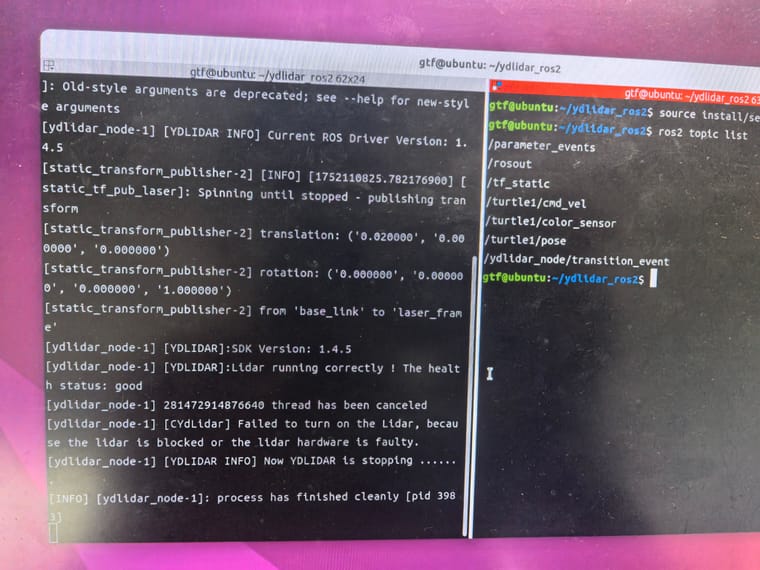
之后在终端打印驱动加载日志,命令 sudo dmesg | grep ttyUSB0,输出如下:
[ 5.584720] usb 1-1.3: ch341-uart converter now attached to ttyUSB0
[ 8.770364] ch341-uart ttyUSB0: ch341-uart converter now disconnected from ttyUSB0
无法连接ttyUSB0
之后询问AI说是驱动冲突问题,用以下命令解决:
sudo systemctl stop brltty ModemManager
sudo systemctl disable brltty ModemManager
sudo apt purge brltty -y
sudo reboot -
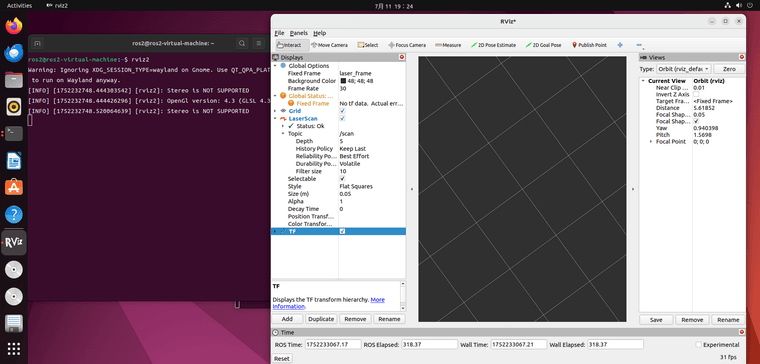
为什么的,没有雷达图 -
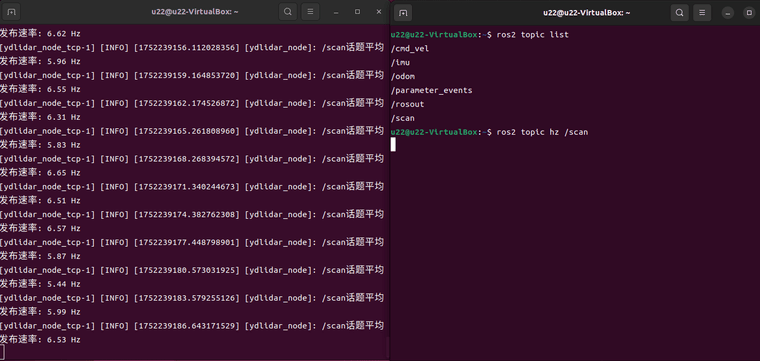
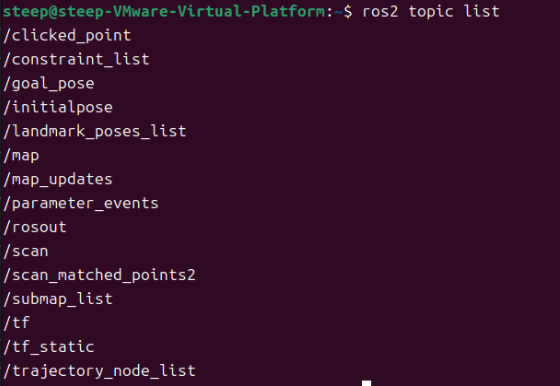
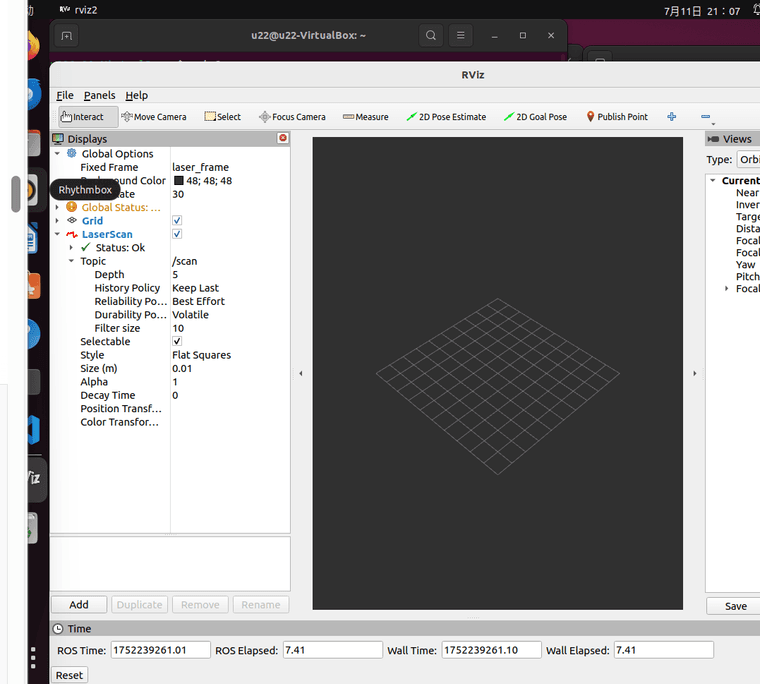 @小鱼 这是怎么回事大佬,雷达能够发送,但是rviz里面没有图像,ros2 topic hz /scan
@小鱼 这是怎么回事大佬,雷达能够发送,但是rviz里面没有图像,ros2 topic hz /scan
这个命令也一直卡着没报错也没有其他数据。