[FishBot教程]9.0.7. FishBot-Nav2导航测试
-
@2934775495 sudo apt install ros-humble-joint-state-publisher
-
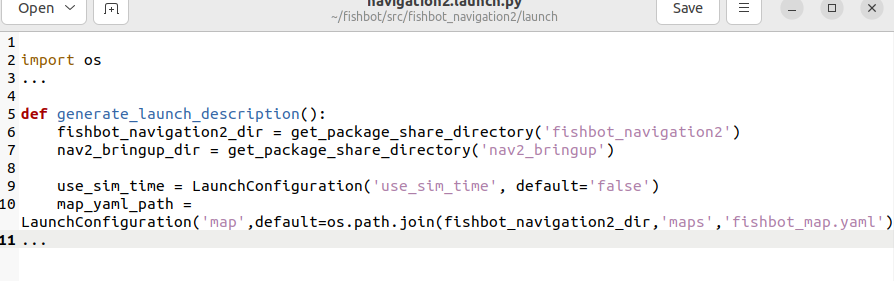
@小鱼 已经解决了,但是后面启动导航出问题了,我改了.py文件的内容出现这个问题,我是在VScode里面打开一个终端进行colcon build的,不知道为什么不可以
-
@2934775495
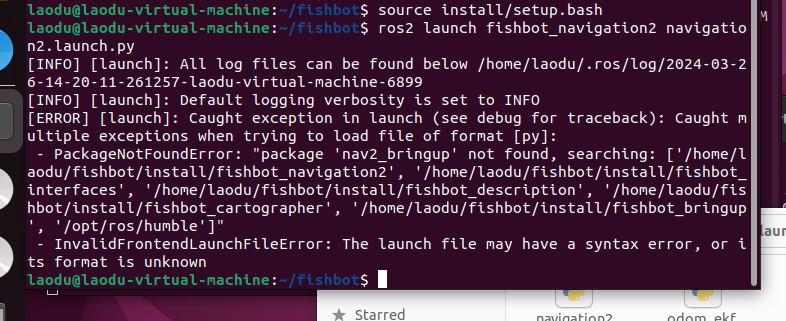
又试了一遍,现在是这样子 -
明明有文件,为什么找不到包呢? -
@2916186745 不知道啊,很奇怪
-
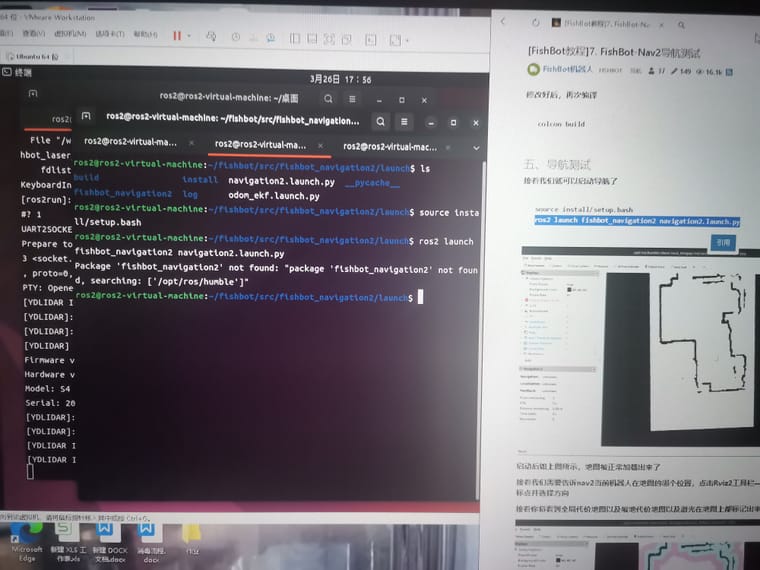
@2916186745 目录搞错了,你应该在工作空间下构建和source
-
此回复已被删除! -
@2496480233 看看路径里是不是有中文
-
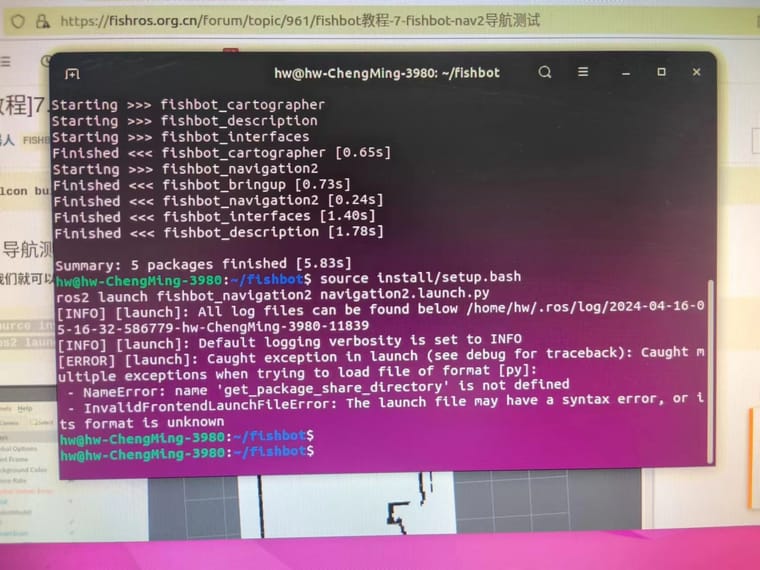
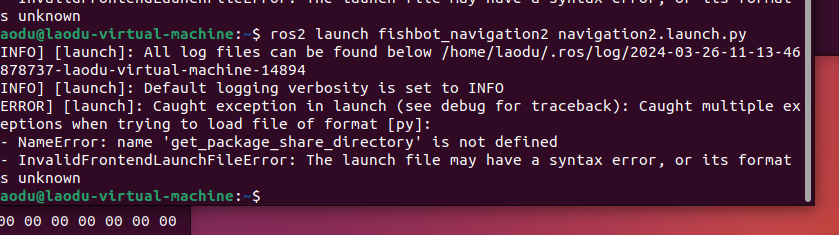
鱼哥,我这边跑导航测试那一步ros2 launch fishbot_navigation2 navigation2.launch.py的时候会出现这个问题,要怎么解决呢? -
@2934775495 按照要求,单独发帖提问下
-
@2934775495 我也有同样的问题
-
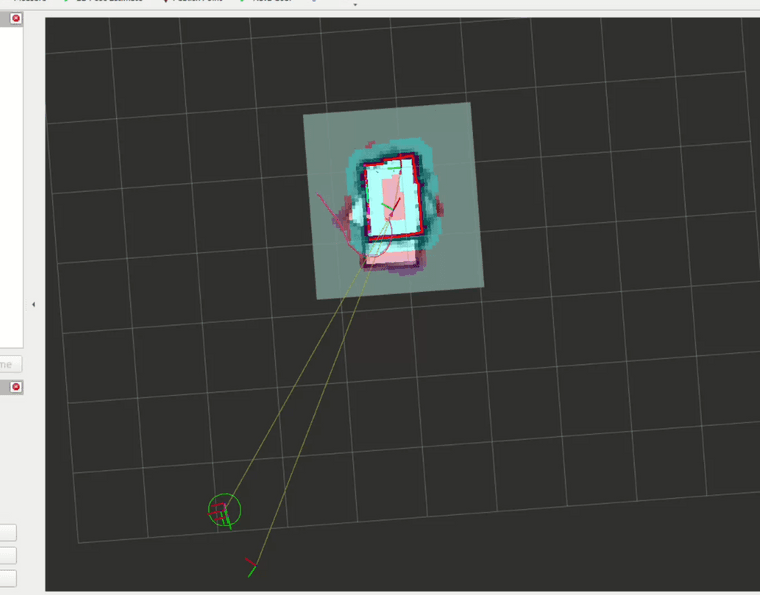
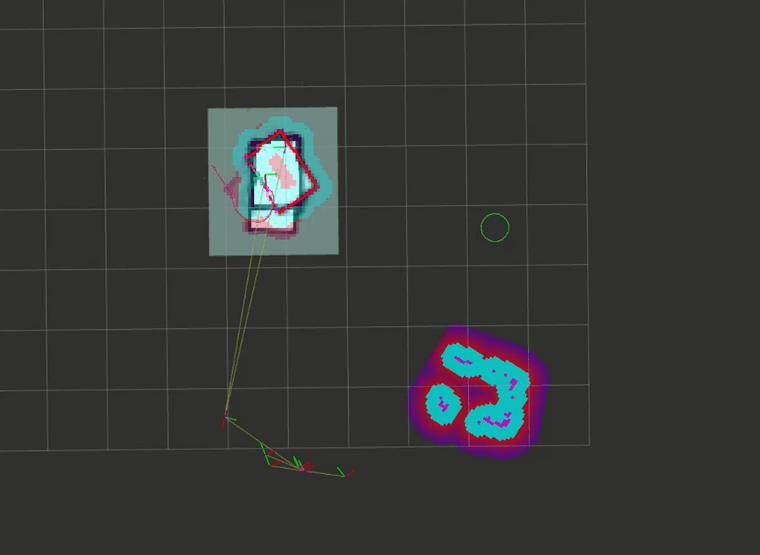
请问进行导航的时候 地图变成这个样子是怎么回事 怎么解决 -
@1032063747 什么一键安装?我也卡在这里了,请问可以分享一下处理办法吗?
-
@小鱼 在 [FishBot教程]7. FishBot-Nav2导航测试 中说:
ros2 launch fishbot_bringup fishbot_bringup.launch.py
eepdriving@deepdriving:~/fishbot$ ros2 launch fishbot_bringup fishbot_bringup.launch.py [INFO] [launch]: All log files can be found below /home/deepdriving/.ros/log/2024-05-11-15-55-53-146433-deepdriving-1888666 [INFO] [launch]: Default logging verbosity is set to INFO Task exception was never retrieved future: <Task finished name='Task-2' coro=<LaunchService._process_one_event() done, defined at /opt/ros/foxy/lib/python3.8/site-packages/launch/launch_service.py:226> exception=PackageNotFoundError("package 'joint_state_publisher' not found, searching: ['/home/deepdriving/fishbot/install/fishbot_navigation2', '/home/deepdriving/fishbot/install/fishbot_interfaces', '/home/deepdriving/fishbot/install/fishbot_description', '/home/deepdriving/fishbot/install/fishbot_cartographer', '/home/deepdriving/fishbot/install/fishbot_bringup', '/opt/ros/foxy']")> Traceback (most recent call last): File "/opt/ros/foxy/lib/python3.8/site-packages/ament_index_python/packages.py", line 50, in get_package_prefix content, package_prefix = get_resource('packages', package_name) File "/opt/ros/foxy/lib/python3.8/site-packages/ament_index_python/resources.py", line 48, in get_resource raise LookupError( LookupError: Could not find the resource 'joint_state_publisher' of type 'packages' During handling of the above exception, another exception occurred: Traceback (most recent call last): File "/opt/ros/foxy/lib/python3.8/site-packages/launch/launch_service.py", line 228, in _process_one_event await self.__process_event(next_event) File "/opt/ros/foxy/lib/python3.8/site-packages/launch/launch_service.py", line 248, in __process_event visit_all_entities_and_collect_futures(entity, self.__context)) File "/opt/ros/foxy/lib/python3.8/site-packages/launch/utilities/visit_all_entities_and_collect_futures_impl.py", line 45, in visit_all_entities_and_collect_futures futures_to_return += visit_all_entities_and_collect_futures(sub_entity, context) File "/opt/ros/foxy/lib/python3.8/site-packages/launch/utilities/visit_all_entities_and_collect_futures_impl.py", line 45, in visit_all_entities_and_collect_futures futures_to_return += visit_all_entities_and_collect_futures(sub_entity, context) File "/opt/ros/foxy/lib/python3.8/site-packages/launch/utilities/visit_all_entities_and_collect_futures_impl.py", line 45, in visit_all_entities_and_collect_futures futures_to_return += visit_all_entities_and_collect_futures(sub_entity, context) [Previous line repeated 1 more time] File "/opt/ros/foxy/lib/python3.8/site-packages/launch/utilities/visit_all_entities_and_collect_futures_impl.py", line 38, in visit_all_entities_and_collect_futures sub_entities = entity.visit(context) File "/opt/ros/foxy/lib/python3.8/site-packages/launch/action.py", line 108, in visit return self.execute(context) File "/opt/ros/foxy/lib/python3.8/site-packages/launch_ros/actions/node.py", line 453, in execute ret = super().execute(context) File "/opt/ros/foxy/lib/python3.8/site-packages/launch/actions/execute_process.py", line 823, in execute self.__expand_substitutions(context) File "/opt/ros/foxy/lib/python3.8/site-packages/launch/actions/execute_process.py", line 668, in __expand_substitutions cmd = [perform_substitutions(context, x) for x in self.__cmd] File "/opt/ros/foxy/lib/python3.8/site-packages/launch/actions/execute_process.py", line 668, in <listcomp> cmd = [perform_substitutions(context, x) for x in self.__cmd] File "/opt/ros/foxy/lib/python3.8/site-packages/launch/utilities/perform_substitutions_impl.py", line 26, in perform_substitutions return ''.join([context.perform_substitution(sub) for sub in subs]) File "/opt/ros/foxy/lib/python3.8/site-packages/launch/utilities/perform_substitutions_impl.py", line 26, in <listcomp> return ''.join([context.perform_substitution(sub) for sub in subs]) File "/opt/ros/foxy/lib/python3.8/site-packages/launch/launch_context.py", line 232, in perform_substitution return substitution.perform(self) File "/opt/ros/foxy/lib/python3.8/site-packages/launch_ros/substitutions/executable_in_package.py", line 76, in perform package_prefix = super().perform(context) File "/opt/ros/foxy/lib/python3.8/site-packages/launch_ros/substitutions/find_package.py", line 79, in perform result = self.find(package) File "/opt/ros/foxy/lib/python3.8/site-packages/launch_ros/substitutions/find_package.py", line 96, in find return get_package_prefix(package_name) File "/opt/ros/foxy/lib/python3.8/site-packages/ament_index_python/packages.py", line 52, in get_package_prefix raise PackageNotFoundError( ament_index_python.packages.PackageNotFoundError: "package 'joint_state_publisher' not found, searching: ['/home/deepdriving/fishbot/install/fishbot_navigation2', '/home/deepdriving/fishbot/install/fishbot_interfaces', '/home/deepdriving/fishbot/install/fishbot_description', '/home/deepdriving/fishbot/install/fishbot_cartographer', '/home/deepdriving/fishbot/install/fishbot_bringup', '/opt/ros/foxy']" -
@1578752813 1.请使用ubuntu22.04 系统 2.请安装 joint_state_publisher
-
@小鱼 在 [FishBot教程]7. FishBot-Nav2导航测试 中说:
rosdep install --from-paths src --ignore-src -y -r
使用foxy版本的ros2的话,git clone 之后,记得要git checkout foxy,切换到对应分支,否则安装依赖时会有部分安装不上。
-
-
@小鱼
我发现foxy版本fishbot_bringup没有这个包,还需要执行以下步骤吗?
如果不执行,直接执行nav2似乎不行source install/setup.bash ros2 launch fishbot_bringup fishbot_bringup.launch.py -
@1006076811 可以把humble版本的拷贝过去
-
此回复已被删除!
