[FishBot教程]9.0.4.使用ROS2键盘控制FishBot
-
@小鱼 鱼哥我出现这个问题怎么解决呢
-
@小鱼 而且鱼哥我也是只有键盘控制线速度 第一次尝试J键小车可以运行 但是 第二次在恩就不i行了
-
@1738836685 鱼哥我的键盘可以控制 但是小车位置信息还是不能显示 就是我图片放的那个样子
-
@1738836685 发帖前记得看一下
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
解决方法,去掉--field即可
ros2 topic echo /odom -
鱼哥我转向可以,但是只前进后退就不行,是不是轮胎没有安装好的原因?因为掉了一个鸡米螺丝。
-
@921203724 前进后退会怎么样,不走吗
-
@小鱼 没错,前进后退不走
-
此回复已被删除! -
@小鱼 螺丝没拧紧,刚才解决了,但是后来左右转又没反应了,只能前进后退了
-
@921203724 确认下是不是指令没发下去,看看板子上的电压是否正常为12V左右
-
此回复已被删除! -
@小鱼 鱼哥,我在启动fishbot时候一直都只有send_message和recv_message两个消息,剩下两个一直出不来,第三节的内容重复测试好几次了,网络也能ping通,用的也是桥接模式,2.4Hz的wifi
能帮我看一下是为什么吗 -
@小鱼 还有,输入ros2 topic list也始终找不到fishbot的相关话题
-
@1820522365 用的什么版本固件?
-
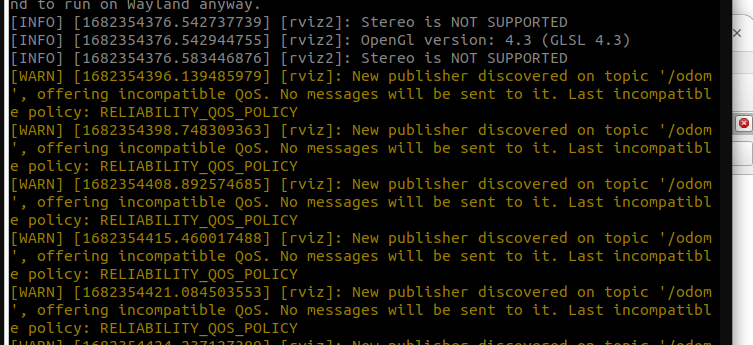
我正在使用Ubuntu22.04,想按照教程用rviz看odom的数据,但是报错
[WARN] [1682354166.288157305] [rviz]: New publisher discovered on topic '/odom', offering incompatible QoS. No messages will be sent to it. Last incompatible policy: RELIABILITY_QOS_POLICY好像是DDS的QoS不匹配,是不是因为版本问题?
-
@1115326614 这个正常,你修改下rviz2中的qos配置就行
-
鱼哥 用键盘控制小车的时候小车不动 下面是第一步执行的返回结果 是没连上小车吗 连上了的话问题可能在哪
[1684050279.548598] info | UDPv4AgentLinux.cpp | init | running... | port: 8888 [1684050279.549095] info | Root.cpp | set_verbose_level | logger setup | verbose_level: 6 [1684050280.011730] debug | UDPv4AgentLinux.cpp | recv_message | [==>> UDP <<==] | client_key: 0x00000000, len: 24, data: 0000: 80 00 00 00 00 01 10 00 58 52 43 45 01 00 01 0F 12 62 4A A7 81 00 FC 03 [1684050280.011807] info | Root.cpp | create_client | create | client_key: 0x12624AA7, session_id: 0x81 [1684050280.011842] info | SessionManager.hpp | establish_session | session established | client_key: 0x308431527, address: 192.168.0.106:53747 [1684050280.011972] debug | UDPv4AgentLinux.cpp | send_message | [** <<UDP>> **] | client_key: 0x12624AA7, len: 19, data: 0000: 81 00 00 00 04 01 0B 00 00 00 58 52 43 45 01 00 01 0F 00 [1684050280.016867] debug | UDPv4AgentLinux.cpp | recv_message | [==>> UDP <<==] | client_key: 0x12624AA7, len: 56, data: 0000: 81 80 00 00 01 07 2E 00 00 0A 00 01 01 03 00 01 1F 00 00 00 00 01 00 00 17 00 00 00 66 69 73 68 0020: 62 6F 74 5F 6D 6F 74 69 6F 6E 5F 63 6F 6E 74 72 6F 6C 00 79 00 00 73 67 -
@2496480233 看起来是连上了,你看看odom话题有没有数据,电机线有没有连接正常
-
@小鱼 odom话题也报错了
tapapia@ubuntu:~$ ros2 topic echo /odom --field pose.pose usage: ros2 [-h] Call `ros2 <command> -h` for more detailed usage. ... ros2: error: unrecognized arguments: --field pose.pose怎么回事呢
-
@2496480233 在 [FishBot教程]4.使用ROS2键盘控制FishBot 中说:
ros2 topic echo /odom 这样子