[FishBot教程] 9.0.3. 主控板固件烧录与配置
-
@2267570370串口监视器也打不开串口
-
@2267570370 argent可以正常连接
-
@2267570370 虚拟机还是实体机,端口占用问题是否解决
-
执行
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6
的时候报错了,
错误信息:
Unable to find image 'microros/micro-ros-agent:eloquent' locally
docker: Error response from daemon: manifest for microros/micro-ros-agent:eloquent not found: manifest unknown: manifest unknown.
See 'docker run --help'. -
@1738836685 解决了吗?我也是这个问题
-
@小鱼 这个解决了吗
-
-
-
@13768252287 系统什么版本,重启电脑,conda 退出来,再试一试
-
执行xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY fishros2/fishbot-tool:v1.0.0.20230522 python3 main.py
报错
qt.qpa.xcb: could not connect to display unix:1
qt.qpa.plugin: Could not load the Qt platform plugin "xcb" in "" even though it was found.
This application failed to start because no Qt platform plugin could be initialized. Reinstalling the application may fix this problem.Available platform plugins are: wayland-egl, eglfs, xcb, vnc, vkkhrdisplay, minimalegl, wayland, minimal, linuxfb, offscreen.
-
@小鱼 ubuntu22.04
-
@13768252287 hunble
-
@小鱼 重启了没有效果
-
@13768252287 1.是否退出conda
-
尝试指令 echo $DISPLAY 看看结果
-
测试指令:xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix:0 fishros2/fishbot-tool:v1.0.0.20230522 python3 main.py
在 提问前必看!一定要看!必须看一下! 中说:
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。
-
-
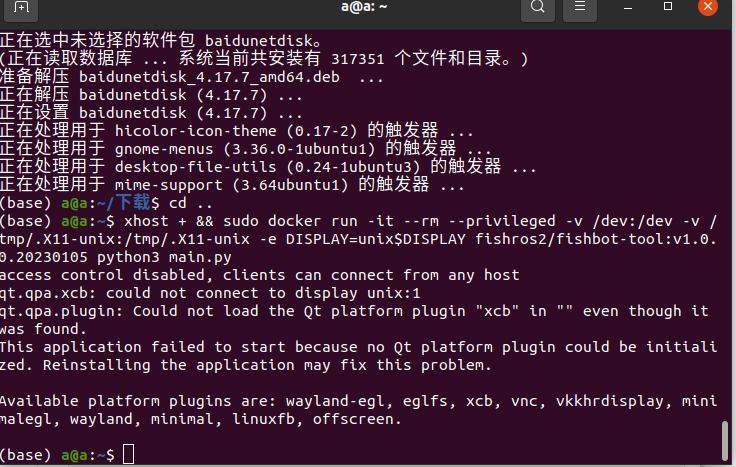
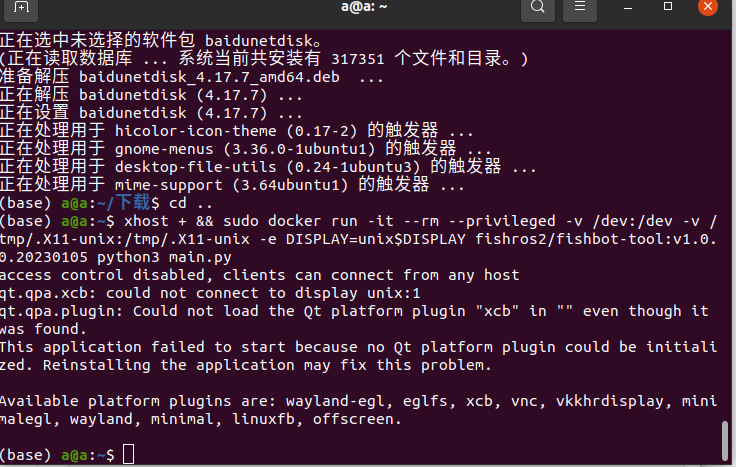
@小鱼 ``执行了还是报错
export ROS_DISTRO=humbleconda已退出,环境变量也刷新了xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY fishros2/fishbot-tool:v1.0.0.20230108 python3 main.py
access control disabled, clients can connect from any host
qt.qpa.xcb: could not connect to display unix:1
qt.qpa.plugin: Could not load the Qt platform plugin "xcb" in "" even though it was found.
This application failed to start because no Qt platform plugin could be initialized. Reinstalling the application may fix this problem.Available platform plugins are: wayland-egl, eglfs, xcb, vnc, vkkhrdisplay, minimalegl, wayland, minimal, linuxfb, offscreen.
-
@13768252287 第二个指令输出的结果和第三个指令的结果呢
-
vm虚拟机烧录出现2023-10-26 14:45:32 > [错误]读取到配置项失败{'error': '串口打开异常,请检查设备是否被占用'}
2023-10-26 14:46:02 > [错误]读取到配置项失败{'error': '串口打开异常,请检查设备是否被占用'} -
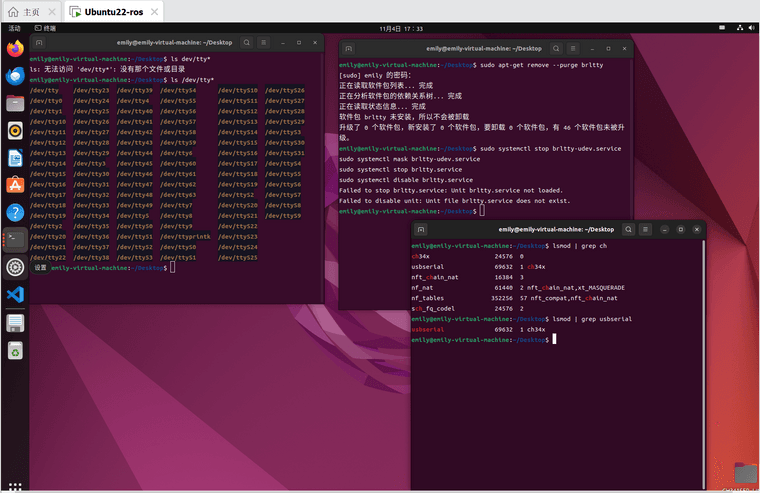
Ubuntu22系统识别不到ttyUSB,已卸载占用项也下载了ch34x驱动
是在VM下安装的Ubuntu22系统,安装了ROS2,也卸载了brltty占用项,上网查了驱动问题也下载了新的驱动,利用lsmod | grep ch命令能够看到驱动ch34x、usbserial运行正常,在VM软件里也选择了让该设备连接到该虚拟机,但是就是识别不到ttyUSB端口,数据线是正常的,连接到jetson上可以识别到ttyUSB,但是jetson的内核原因下载不了配置助手,运行过sudo dmesg | grep brltty命令,并没有占用问题
求救,已经头疼一天了
-
@1467427631 请问您之前识别不到ttyUSB后是怎么解决的呢
-
@1041632611 最有可能是虚拟机造成的问题,另外ch340驱动系统自带,无需额外安装。
可以尝试手动编译运行配置助手:源码使用
首先克隆代码到本地,接着安装 PyQt6,PySide6,pyserial,esptool
git clone http://github.fishros.org/https://github.com/fishros/fishbot_tool.git sudo apt install python3-pip sudo pip3 install PyQt6 PySide6 pyserial esptool -i https://pypi.tuna.tsinghua.edu.cn/simple接着执行
cd fishbot_tool/fishbot_tool/ sudo DISPLAY=unix$DISPLAY python3 main.py