拓展2:FishBot配套雷达驱动教程(源码版)
-
你好,现在orangepi上面报Failed to get scan 这个是什么原因?
(rosenv) orangepi@orangepi5:~/microros_ws/ydlidar/ydlidar_ros2$ ros2 launch ydlidar ydlidar_launch.py
[INFO] [launch]: All log files can be found below /home/orangepi/.ros/log/2025-04-23-14-31-36-257614-orangepi5-7885
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [ydlidar_node-1]: process started with pid [7896]
[INFO] [static_transform_publisher-2]: process started with pid [7898]
[static_transform_publisher-2] [WARN] [1745389896.446912442] []: Old-style arguments are deprecated; see --help for new-style arguments
[static_transform_publisher-2] [INFO] [1745389896.473410801] [static_tf_pub_laser]: Spinning until stopped - publishing transform
[static_transform_publisher-2] translation: ('0.020000', '0.000000', '0.000000')
[static_transform_publisher-2] rotation: ('0.000000', '0.000000', '0.000000', '1.000000')
[static_transform_publisher-2] from 'base_link' to 'laser_frame'
[ydlidar_node-1] [YDLIDAR INFO] Current ROS Driver Version: 1.4.5
[ydlidar_node-1] [YDLIDAR]:SDK Version: 1.4.5
[ydlidar_node-1] [YDLIDAR]:Lidar running correctly ! The health status: good
[ydlidar_node-1] [YDLIDAR]:Fixed Size: 2050
[ydlidar_node-1] [YDLIDAR]:Sample Rate: 3K
[ydlidar_node-1] [YDLIDAR INFO] Current Sampling Rate : 3K
[ydlidar_node-1] [YDLIDAR INFO] Now YDLIDAR is scanning ......
[ydlidar_node-1] [ERROR] [1745389915.174494029] [ydlidar_node]: Failed to get scan
[ydlidar_node-1] [ERROR] [1745389919.145806575] [ydlidar_node]: Failed to get scan
[ydlidar_node-1] [ERROR] [1745389921.941235704] [ydlidar_node]: Failed to get scan
[ydlidar_node-1] [ERROR] [1745389923.942431973] [ydlidar_node]: Failed to get scan
[ydlidar_node-1] [ERROR] [1745389925.943934945] [ydlidar_node]: Failed to get scan
[ydlidar_node-1] [ERROR] [1745389927.945296170] [ydlidar_node]: Failed to get scan
[ydlidar_node-1] [ERROR] [1745389929.946426398] [ydlidar_node]: Failed to get scan
[ydlidar_node-1] [ERROR] [1745389931.947322422] [ydlidar_node]: Failed to get scan
[ydlidar_node-1] [ERROR] [1745389933.948195696] [ydlidar_node]: Failed to get scan
[ydlidar_node-1] [ERROR] [1745390015.568714267] [ydlidar_node]: Failed to get scan
[ydlidar_node-1] [ERROR] [1745390017.569674748] [ydlidar_node]: Failed to get scan
[ydlidar_node-1] [ERROR] [1745390019.570894808] [ydlidar_node]: Failed to get scan
[ydlidar_node-1] [ERROR] [1745390021.571772458] [ydlidar_node]: Failed to get scan
[ydlidar_node-1] [ERROR] [1745390023.572790688] [ydlidar_node]: Failed to get scan -
@mmmkmmm windows上的,板子没有设计DTR,后面的检测失败正常
-
@mmmkmmm 有电脑端吗,之前测试过wifi的方案吗
-
@小鱼 是不是这个雷达板有问题啊,用官方的工具,启动雷达也不行

-
@mmmkmmm 你手里是哪个版本的雷达
-
@mmmkmmm 全新雷达不是X2
-
@小鱼 是全新的雷达,公司采购刚在你们店新买的。
-
@mmmkmmm 全新雷达是F2,带激光强度信息的,这个工具不支持
-
@mmmkmmm 有测试过快速上手教程吗
-
@小鱼 就是按上面的快速上手,一直不行,上面教程又说是X2雷达,那这款雷达相应驱动、教程有没有?
-
@mmmkmmm 这个帖子不是快速上手教程,你按照快速上手教程试试
-
@mmmkmmm 快速上手教程走的是wifi驱动,不是有线方式
-
-
@小鱼 是不是python_driver这个分支?
-
@mmmkmmm 是的
-
@小鱼 官网上面找不到F2这个型号?这个官方测试工具有没有?
-
@mmmkmmm 官方测试工具没有,定制款雷达,我刚才提供的驱动里有
-
@小鱼 鱼哥,我使用串口的化应该怎么配置呢?
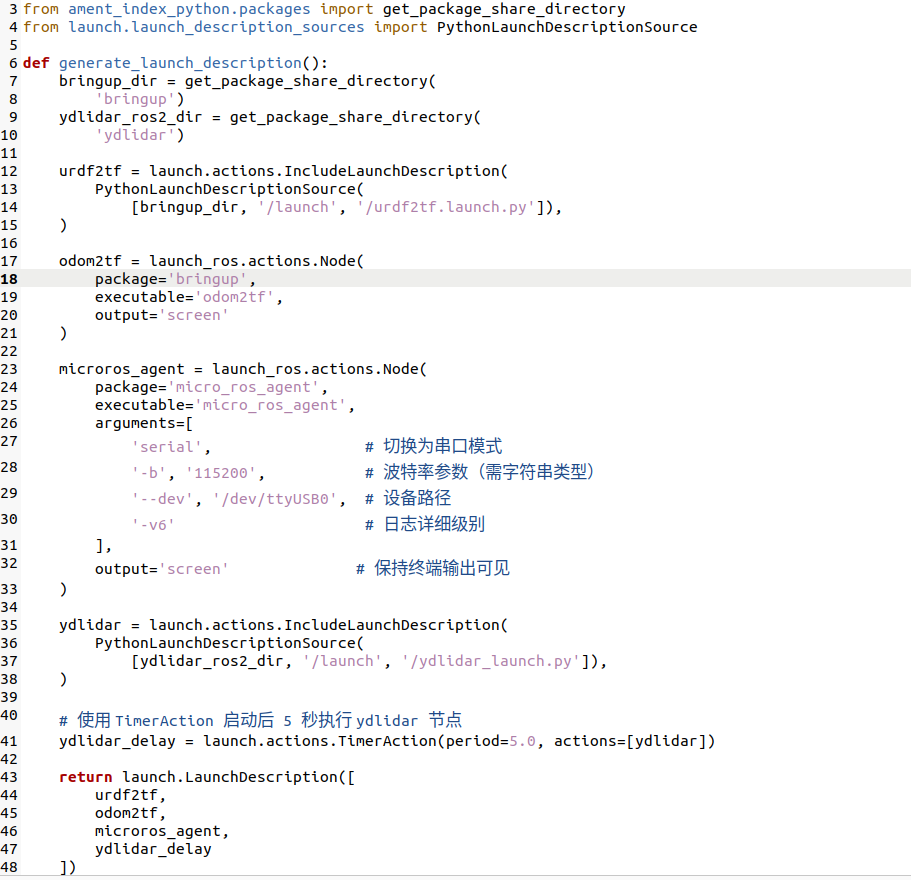
我的底盘开的线程如下:

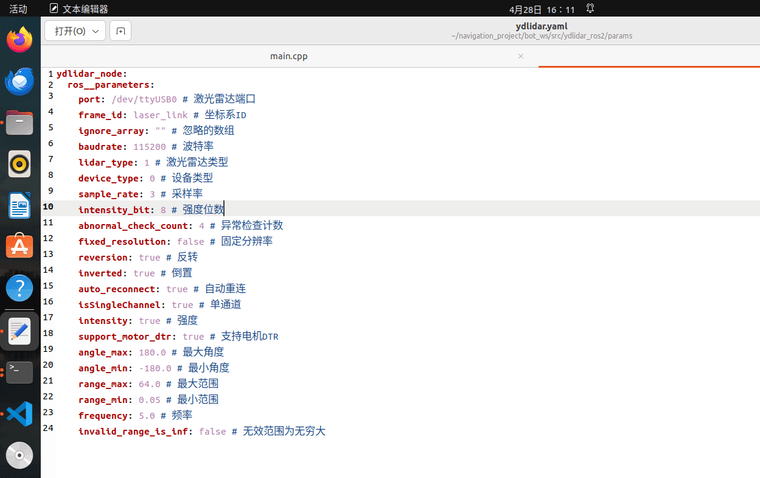
雷达的parm如下:
我的launch如下:
使用:ros2 launch slam_toolbox online_async_launch.py use_sim_time:=False
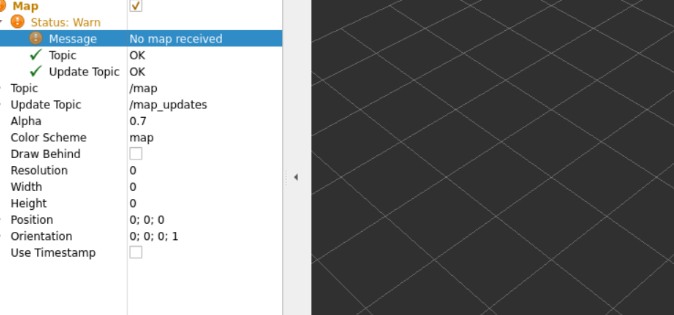
然后建图在rviz2里面显示没有收到map,但是又/map话题,请问这个是因为什么问题呢?如下:
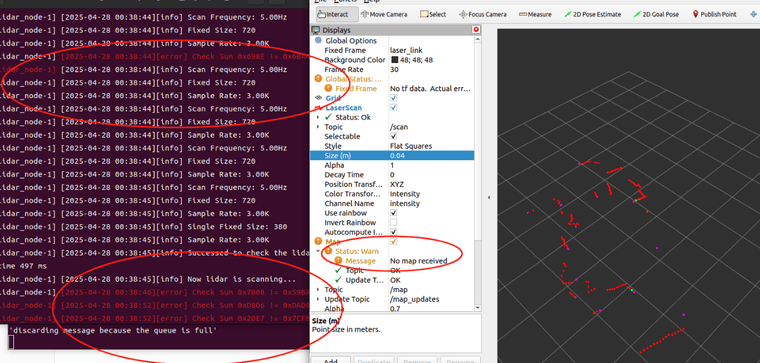
然后我单独驱动雷达节点的时候有scan话题,也可以在rviz2里面显示点云信息(qos:best_effort),但是会有红色的显示,这个是什么原因呢?
-
@1117 看看里程计有没有数据
-
我运行时有以下提示:
ros2 launch ydlidar ydlidar_launch.py [INFO] [launch]: All log files can be found below /home/shakima/.ros/log/2025-05-13-23-14-24-099700-shakima-2728 [INFO] [launch]: Default logging verbosity is set to INFO [INFO] [ydlidar_node-1]: process started with pid [2739] [INFO] [static_transform_publisher-2]: process started with pid [2741] [static_transform_publisher-2] [WARN] [1747149264.180160478] []: Old-style arguments are deprecated; see --help for new-style arguments [ydlidar_node-1] [YDLIDAR INFO] Current ROS Driver Version: 1.4.5 [static_transform_publisher-2] [INFO] [1747149264.189100590] [static_tf_pub_laser]: Spinning until stopped - publishing transform [static_transform_publisher-2] translation: ('0.000000', '0.000000', '0.020000') [static_transform_publisher-2] rotation: ('0.000000', '0.000000', '0.000000', '1.000000') [static_transform_publisher-2] from 'base_link' to 'laser_frame' [ydlidar_node-1] [YDLIDAR]:SDK Version: 1.4.5 [ydlidar_node-1] Error, cannot retrieve Yd Lidar health code: ffffffff [ydlidar_node-1] [YDLIDAR]:SDK Version: 1.4.5 [ydlidar_node-1] Error, cannot retrieve Yd Lidar health code: ffffffff [ydlidar_node-1] get Device Information Error [ydlidar_node-1] get Device Information Error [ydlidar_node-1] [CYdLidar::initialize] Error initializing YDLIDAR check status. [ydlidar_node-1] [YDLIDAR INFO] Now YDLIDAR is stopping ....... [INFO] [ydlidar_node-1]: process has finished cleanly [pid 2739]因怎么解决是硬件问题吗,我的数据线是ubs3.0的,ubuntu22.04双系统