【教程】使用Windows子系统WSL安装ROS2运行小海龟
-
@abnerayyub 再试试,刚更新
-
@小鱼 感谢 小鱼哥 安装成功
-
@李万宝 解决了,需要在这个终端的界面里使用按键,鼠标点一下这个终端,在光标这里按键盘

-
@施 在 【教程】使用Windows子系统WSL安装ROS2运行小海龟 中说:
无法将磁盘“C:\Users\qwert\AppData\Local\Packages\CanonicalGroupLimited.Ubuntu22.04LTS_79rhkp1fndgsc\LocalState\ext4.vhdx”附加到 WSL2: 系统找不到指定的文件。
错误代码: Wsl/Service/CreateInstance/MountVhd/HCS/ERROR_FILE_NOT_FOUND@施 咋解决的?我也突然遇到这个问题了。
-
此回复已被删除! -
@lovedreamms 在 【教程】使用Windows子系统WSL安装ROS2运行小海龟 中说:
@Zengs 在 【教程】使用Windows子系统WSL安装ROS2运行小海龟 中说:
@mahong1237 我也是这个问题,但是我再开启一个终端运行rqt,刷新node graph,小海龟就可以操作了
情况+1,大家有找到解决方案嘛
情况说明
使用wsl-22.04运行海龟程序,键盘控制无法生效
开启一个终端运行rqt,刷新node graph,可以使用关闭以后无法使用
ros2 node list等指令无法使用同样的问题已解决。
修改user下的.wslconfig, 把配置文件里的firewall=true改为firewall=false -
我这边一直显示依赖问题

按照括号后面操作了也完全没有用
在另一个窗口输入命令也是一样的结果 -
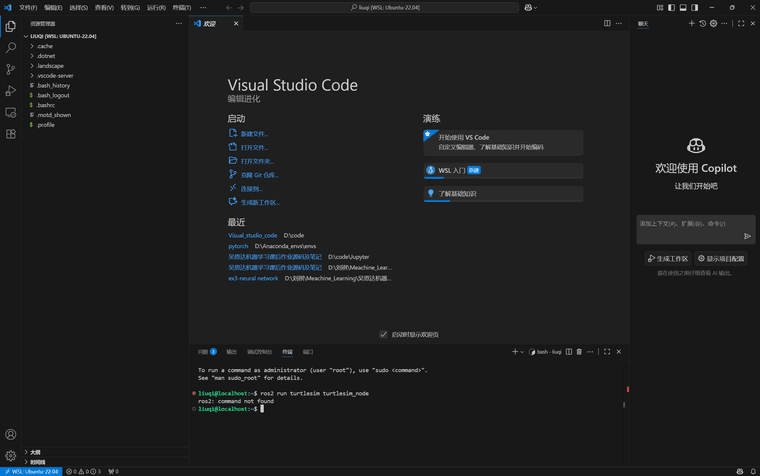
为什么我的VScode运行不了ros2呀?明明我下了ros2
-
@李万宝 wsl2图形的解决办法:
WSLg 是微软官方为 WSL 提供的内置 GUI 支持功能。它在 Windows 11 和较新版本的 Windows 10 中是默认开启的,无需安装第三方软件。确保 WSLg 已启用
打开 Windows 的 PowerShell 或 CMD (Command Prompt) 终端(不是 WSL 里的),运行以下命令来更新 WSL:
Bash
wsl --update
如果提示需要更新,请等待更新完成,然后重启 WSL:Bash
wsl --shutdown
关闭所有 WSL 窗口,然后重新打开一个新的 WSL 终端即可。设置 DISPLAY 环境变量
WSLg 会自动设置一个名为 DISPLAY 的环境变量,告诉所有 GUI 程序应该把窗口画在哪里。正常情况下,它的值应该是 :0。你的报错很可能是因为这个变量没有被正确设置。在你的 WSL 终端里,运行以下命令来临时设置它:
Bash
export DISPLAY=:0
设置完后,再次尝试运行你的 ROS 2 命令:Bash
ros2 run turtlesim turtlesim_node
如果这次成功了,说明问题就在 DISPLAY 变量。为了让这个设置永久生效,把它写入你的 shell 配置文件中。如果你用的是默认的 bash,就执行:Bash
echo "export DISPLAY=:0" >> ~/.bashrc
source ~/.bashrc