Windows下最简单最快速安装ROS/ROS2,一定成功的教程
-
很多新手刚开始学习ROS的时候因为用不惯Linux,加上安装虚拟机的各种和安装ROS的时候各种难受的折腾,看着挺让人心疼,所以本篇文章主要针对Windows上利用Docker和各种奇淫技巧让你轻松在Windows上搭建好ROS/ROS2的开发环境。
前置教程:
教程一共分为几步:
- 安装choco工具
- 安装基础环境(python+vscode+docker+vsxsrv)
- 生成ROS/ROS2镜像,开始享受
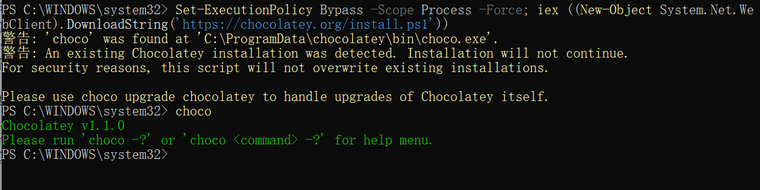
安装choco
Windows,搜索poershell,右下角以管理员身份运行。

接着输入下面的指令,等待片刻,即可完成choco的安装。
Set-ExecutionPolicy Bypass -Scope Process -Force; iex ((New-Object System.Net.WebClient).DownloadString('https://chocolatey.org/install.ps1'))安装完成的标志是输入choco指令有回显。
安装vscode、vcxsrv docker-desktop
choco install vscode vcxsrv docker-desktop -y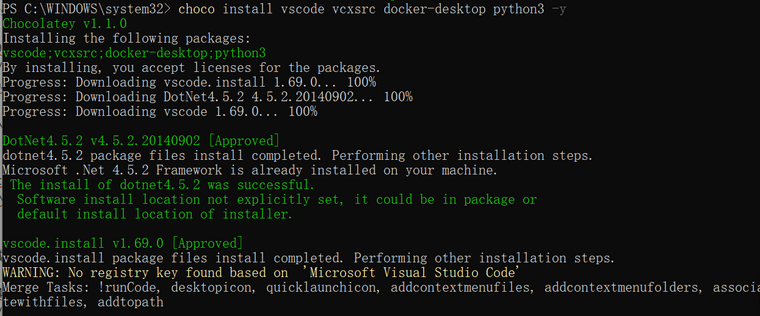
这句话结束后,需要你重启一下电脑
生成ROS容器
也是一句话的事情
docker run -dit --name=d2lros2humble -v d:/home/d -e DISPLAY=host.docker.internal:0.0 fishros2/ros:humble-desktop之后搜索xlaunch,打开,下一页,下一页,接着勾掉一个选项,再勾上另外一个
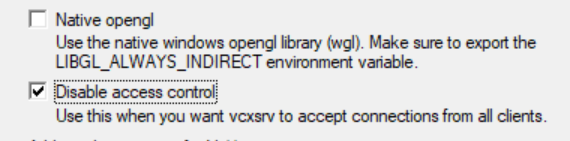
点击完成。
小乌龟测试
docker exec -it d2lros2humble /bin/bash ros2 run turtlesim turtlesim_node打开新的powershell,小乌龟键盘控制
docker exec -it d2lros2humble /bin/bash ros2 run turtlesim turtle_teleop_key编写代码
搜索code,打开vscode,左侧搜索插件,remote container ,第一个安装
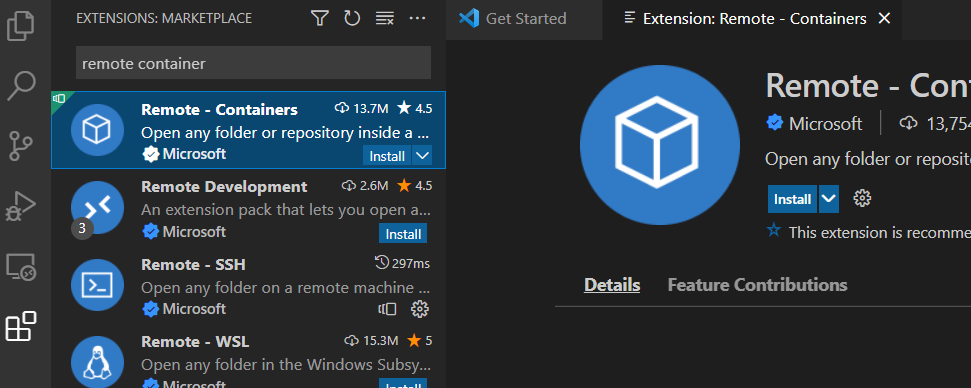
安装完成后你可以看到
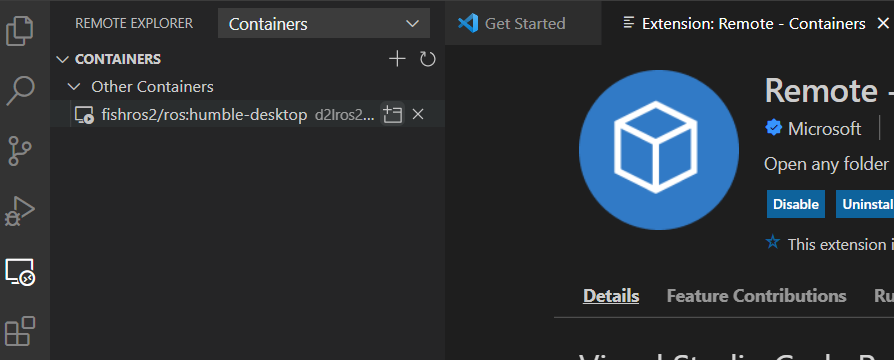
点击文件夹上的小加号,你就可以打开一个新的vscode,接着享受windows下开发ROS带来的便利吧~
当然还有一些小缺陷,比如硬件的支持不太友好,不过当你掌握了docker的使用方法后,你可以安装一个虚拟机,接着在windows下远程连接使用,也是非常的方便噢~
进一步探索:
-
 小 小鱼 在 中固定了该主题
小 小鱼 在 中固定了该主题
-
@小鱼
这个是装的ROS2版本吗?如果要使用ROS版本怎么装? -
@3452188706 remote container现在搜不到了,有其他的插件可以替代么?
-
@diaochengdong 应该还有,看看类似名字的
-
-
@小鱼 PS C:\Users\Administrator> docker run -dit --name=d2lros2humble -v d:/home/d -e DISPLAY=host.docker.internal:0.0 fishros2/ros:humble-desktop
docker: error during connect: in the default daemon configuration on Windows, the docker client must be run with elevated privileges to connect: Post "http://%2F%2F.%2Fpipe%2Fdocker_engine/v1.24/containers/create?name=d2lros2humble": open //./pipe/docker_engine: The system cannot find the file specified.
See 'docker run --help'. -
ubuntu20 使用源码安装好 humble 后,rosdepc 安装的依赖, 无法补全 humble
focal@ubuntu:~/ros2_humble$ rosversion -d
humble
focal@ubuntu:~/ros2_humble$ sudo apt install ros-hu
这里补全 有foxy 没有humble -
@1628799315 focal@ubuntu:~/ros2_humble$ sudo apt install ros-foxy-
Display all 1777 possibilities? (y or n) -
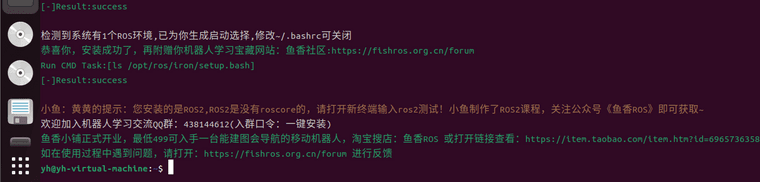 这个ros2的没有roscore怎么解决啊
这个ros2的没有roscore怎么解决啊 -
 这个怎么没有ros1的版本的,我们需要的是ros1,或者ros2没有roscore,怎么解决这个
这个怎么没有ros1的版本的,我们需要的是ros1,或者ros2没有roscore,怎么解决这个 -
@小鱼 在 Windows下最简单最快速安装ROS/ROS2,一定成功的教程 中说:
搜索xlaunch,打开,下一页,下一页,接着勾掉一个选项,再勾上另外一个
这里搜索xlaunch是怎么搜索呢?感谢指导!
-
@2360867583 就直接再windows下搜索应用,上一步有安装:
@小鱼 在 Windows下最简单最快速安装ROS/ROS2,一定成功的教程 中说:
choco install vscode vcxsrv
-
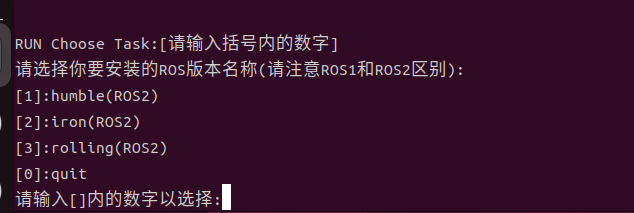
ros noetic如何安装
-
@啦啦啦 把命令中的镜像修改成noetic 就好
-
@小鱼 是这样吗docker run -dit --name=d2lros1noetic -v d:/home/d -e DISPLAY=host.docker.internal:0.0 fishros2/ros:noetic
-
-
@小鱼
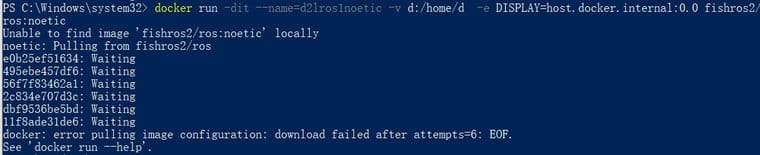 显示这样,是因为网络原因吗
显示这样,是因为网络原因吗 -
@啦啦啦 是的,网络原因
-
@小鱼 感谢!!!!!!
-
@diaochengdong dev container