小鱼 ROS 2 新书上线!点击链接查看, 新书配套视频点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
[FishBot教程] 3. 主控板固件烧录与配置
-
@小鱼 用的https://fishros.org.cn/forum/assets/uploads/files/1688572010091-fishbot_motion_control_v1.0.0.230705.bin这个
-
@2267570370 网络配置是否正常,可以看看下面的视频
链接:https://pan.baidu.com/s/14NKr0QLTnlWwcbUg97IFBQ?pwd=fish
提取码:fish小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
@小鱼 我每次将虚拟机配置为桥接模式时虚拟机就连不上网了
-
@2267570370 这是你的虚拟机有问题,可以咸鱼找个付费支持的给 修复修复
小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
@小鱼 换成virtualbox后重新用配置助手加上配置成桥接网卡就成了

-
@小鱼 小鱼vscode里识别不到我的板子但是ubuntu里显示有ttyUSB0
-
-
此回复已被删除! -
-
@2267570370串口监视器也打不开串口
-
@2267570370 argent可以正常连接
-
@2267570370 虚拟机还是实体机,端口占用问题是否解决
-
执行
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6
的时候报错了,
错误信息:
Unable to find image 'microros/micro-ros-agent:eloquent' locally
docker: Error response from daemon: manifest for microros/micro-ros-agent:eloquent not found: manifest unknown: manifest unknown.
See 'docker run --help'. -
@1738836685 解决了吗?我也是这个问题
-
@小鱼 这个解决了吗
-
-
-
@13768252287 系统什么版本,重启电脑,conda 退出来,再试一试
-
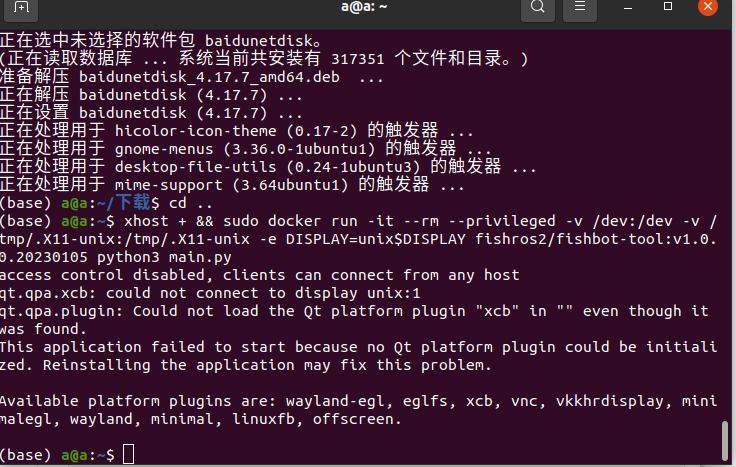
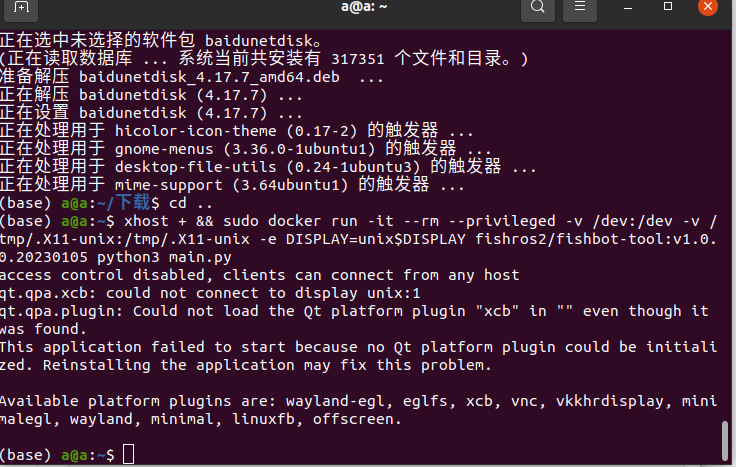
执行xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY fishros2/fishbot-tool:v1.0.0.20230522 python3 main.py
报错
qt.qpa.xcb: could not connect to display unix:1
qt.qpa.plugin: Could not load the Qt platform plugin "xcb" in "" even though it was found.
This application failed to start because no Qt platform plugin could be initialized. Reinstalling the application may fix this problem.Available platform plugins are: wayland-egl, eglfs, xcb, vnc, vkkhrdisplay, minimalegl, wayland, minimal, linuxfb, offscreen.
-
@小鱼 ubuntu22.04

