[FishBot教程] 9.0.3. 主控板固件烧录与配置
-
@2937924867 右上角搜Bind error,或者翻翻帖子
-
@2450115844 所以你这是什么板子,用的什么线,虚拟机什么版本
-
@小鱼 板子是小店买的,插在主控板(有显示屏的)。线是一直用的数据线。ubantu用的是推荐的22.04
-
@2450115844 你软件上选择的是雷达版,应该插雷达板上
-
@小鱼 试过了,当时出现错误就试过多次换接口,电脑那边也换了接口
-
@2450115844 和接口没关系,是要插在雷达板子上,才能给雷达刷,你要看雷达板的教程,这个是主控板的教程,没搞清楚你的目的是什么,烧录雷达板还是烧录主控板。
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
一个好的提问不仅能够帮助自己理清楚问题,还有助于别人快速帮助到你。——提问的智慧
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。大家提问的时候一定需要注意以下几点:
1.使用明确的问题标题
好的标题:一键安装后 进不去图形操作系统(能让人一眼看出问题)
不好的标题(看到后感觉莫名其妙不想回答):
ssh远程登录(远程登录怎么了?)
ROS安装错误(不说什么错误)- 不要截图,要复制粘贴,一定要代码块包裹
不要截图的原因是,代码方便回答者去复制帮你搜索,而且无论是在手机上还是电脑上都更容易看。
用代码块包裹是为了更加美观,不会一个代码很长一段,不易阅读 - 尽量提供更多的信息(大多数问题不是别人不知道如何解决,而是不知道你的问题是什么)
即使再厉害的大佬,也不能通过你的一句话帮你定位出问题,提出解决方案。
如果是程序,版本信息,系统信息,ROS版本,你的前后操作等等都是帮助快速定位的。
- 不要截图,要复制粘贴,一定要代码块包裹
-
鱼哥 在执行启动microros服务的时候因为我使用的ros版本在docker hub上找不到 所以我想要下载latest版本 但是一直出现这个问题
怎么办
-
@2496480233
执行命令docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:latest udp4 --port 8888 -v6返回
Unable to find image 'microros/micro-ros-agent:latest' locally latest: Pulling from microros/micro-ros-agent 345e3491a907: Retrying in 1 second 57671312ef6f: Downloading 5e9250ddb7d0: Retrying in 1 second 62f60c1e15de: Downloading e8fbc9697fb7: Waiting f80a95aef5c9: Waiting 175c1d7cad21: Waiting 42f7ef32b4b5: Waiting e2838bab4fc7: Waiting 5da5c7c89288: Waiting 8e20557a880f: Waiting 3de545ec616a: Waiting 2ddaaceb1bfe: Waiting f55d1ff72160: Waiting 13efe28462ea: Waiting be45bd35408f: Waiting 87a37534ac85: Waiting 0375d7011be6: Waiting 1a36fb817a18: Waiting 89a161fc9476: Waiting b25d5da18afd: Waiting docker: error pulling image configuration: download failed after attempts=4: error parsing HTTP 408 response body: invalid character '<' looking for beginning of value: "<html><body><h1>408 Request Time-out</h1>\nYour browser didn't send a complete request in time.\n</body></html>\n". See 'docker run --help'. -
@2496480233 两个方案:
1、试试这个也行,比较方便,docker代理:https://dockerproxy.com/

2、https://fishros.org.cn/forum/topic/1295/agent-手动编译-不用docker-以及树莓派上使用micros-agent的方法
-
@2748809710 你好请问你怎么解决的
-
上位机:Ubuntu20.04 ROS2版本:FOXY
下位机:fishbot 四驱版
问题:在链接文本中说,我想下载最新的固件20230522版,但是在固件地址那显示的仍然是230108版,且固件下载成功后,有一个车轮一直在全速转动。
操作:在终端执行了
xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY dockerproxy.com/fishros2/fishbot-tool:v1.0.0.20230522 python3 main.py 这条命令。
出现与本文中一样的配置界面,如下图
我应该怎么做? -
@2918095496 设备类型选择四驱版
-
好的,选择四驱库可以了,谢谢鱼哥
-
@小鱼 在 [FishBot教程] 3. 主控板固件烧录与配置 中说:
@2496480233 两个方案:
1、试试这个也行,比较方便,docker代理:https://dockerproxy.com/
2、https://fishros.org.cn/forum/topic/1295/agent-手动编译-不用docker-以及树莓派上使用micros-agent的方法
鱼哥,在执行启动microros服务的时候我也出现了用户TAP-APIA在上面说的问题,鱼哥你的回答第一个方案docker代理,具体怎么操作可以详细说一下吗?
-
小鱼好,我在这一步出了问题。可以检测到设备端口,然后也是主控板,也可以进行一键下载固件烧录。烧录完以后配置设备那里配置项和配置值都为空,显示的具体错误如下:
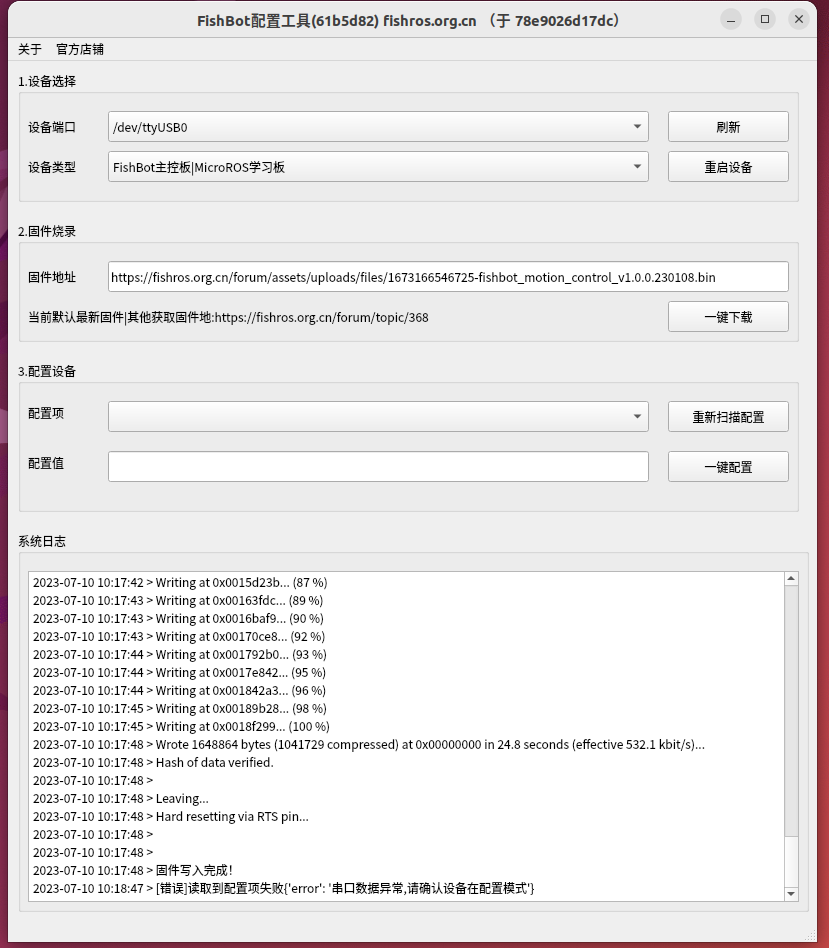
机器人是已经成功进入了udp_client模式
然后我使用的是ubuntu 22.04 安装的Ros2版本是humble -
-
@2844989644 多点几次重新扫描配置shishi
-
@507972610 看提示,价格前缀就行
-
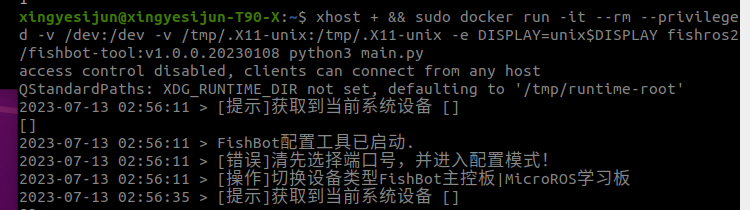
运行配置助手后出现access control disabled, clients can connect from any host
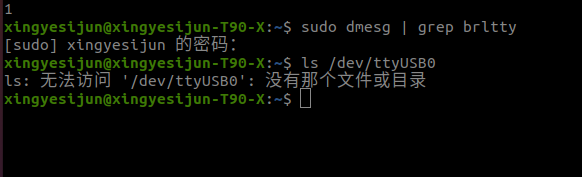
在配置工具页面识别不到端口号,刷新多次也没有,然后终端输入sudo dmesg | grep brltty没有任何反应,后面输入ls /dev/ttyUSB0显示ls: 无法访问 '/dev/ttyUSB0': 没有那个文件或目录,ch340的驱动也已经装过了,重启多次也没用。
使用最后两个方法然后重启电脑也还是不行,不知道怎么弄了 -
@小鱼 请教鱼大