小鱼 ROS 2 新书上线!点击链接查看, 新书配套视频点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
[FishBot教程] 6. 雷达驱动及建图测试
-
@mixllred 请按照要求,单独发帖提问
-
-
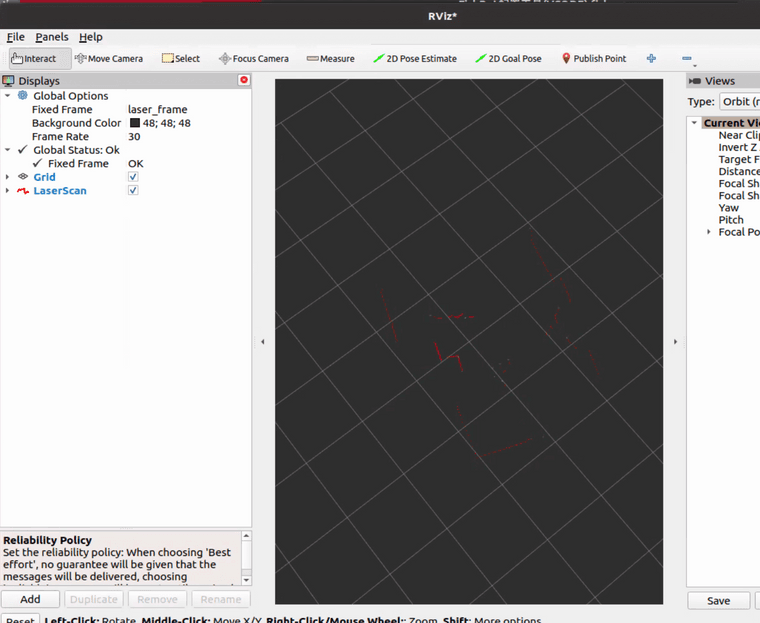
雷达建图不是很清晰,感觉很模糊,是啥问题,如何解决
-
针对第四步,点云数据已经有了,但是Crtl+C,然后输入2之后,并没有产生建图,我遗漏了哪些步骤吗?
-
@1006076811 在 [FishBot教程] 6. 雷达驱动及建图测试 中说:
针对第四步,点云数据已经有了,但是Crtl+C,然后输入2之后,并没有产生建图,我遗漏了哪些步骤吗?
我明白了,需要在rviz2里再添加一个map的监视
-
我这 确实没有 /scan 话题
-
可以正常启动,但是过了一会就会显示failed to get scan 跳帽也转成wifi模式了,请问怎么解决,topic list中也没有话题 -
@1141682555
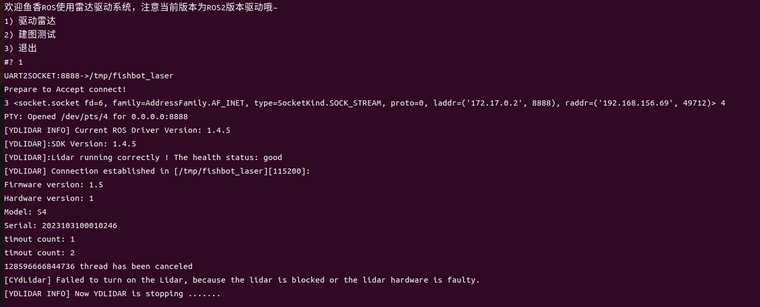
有时候也有报错
“Failed to turn on the Lidar, because the lidar is blocked or the lidar hardware is faulty” -
@1141682555 这个一般是网络不稳定造成的,优化网络结构可以解决
-
@小鱼 我用的是手机热点,是因为热点不稳定造成的么?
-
@1141682555 资料和教程中应该有强调,不要用手机的
-
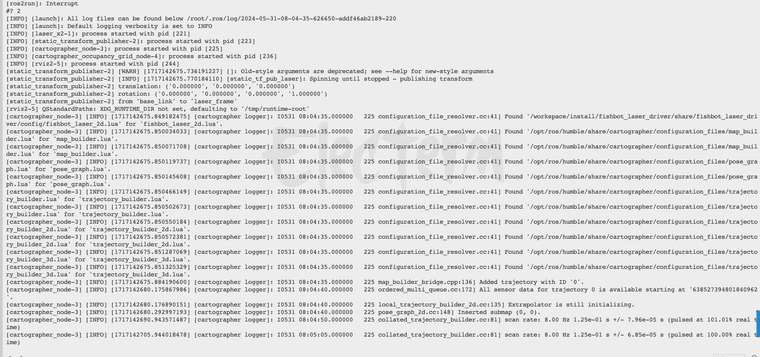
建图时会出现地图重叠的问题,而且laser_frame和base_link坐标系会脱离这是什么问题造成的啊
-
在执行
sudo xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser出现了下面的错误
No protocol specified xhost: unable to open display ":10.0"配置都正常,雷达也在运行状态,可以ping通
-
@2462331351 这个和显示相关,如果显示正常可以忽略
-
@小鱼 有这个镜像的DockerFile吗,我想要重新构建ARM平台的镜像可以给我一下吗
-
@2462331351 这个时间太久了,我自己都找不到了,不过你可以到dockerhub,那里能看到镜像的构建命令
小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
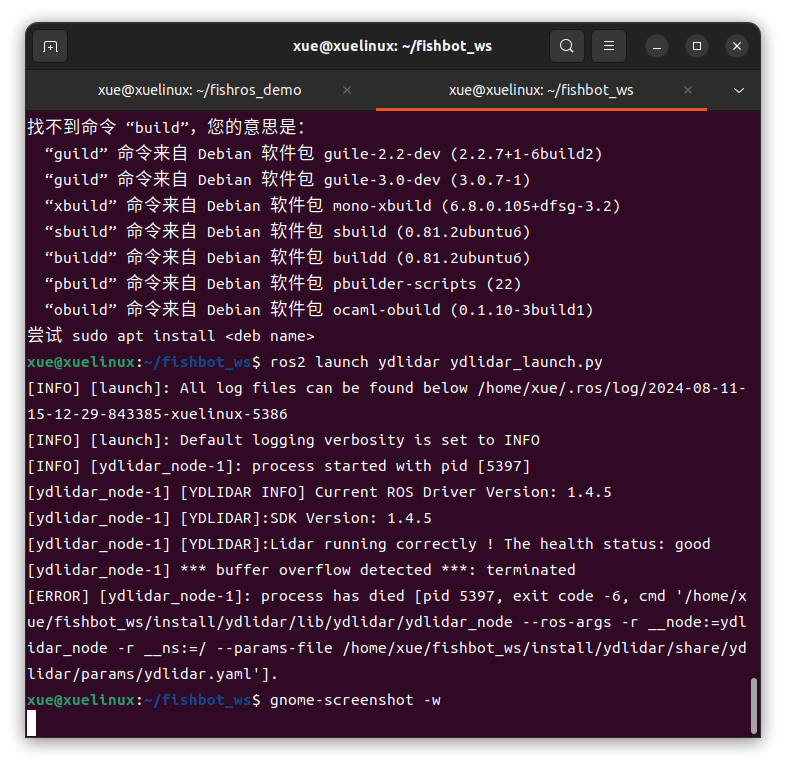
无线驱动雷达,一开始可以
当我看到移动小车建图时,运行驱动这个雷达就又不行了
之后重启,单独运行无线驱动雷达就一直是旁边这个报错了 -
@1281857896 用我做好的docker镜像测试过没
小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
@小鱼 用docker可以的
-
@1281857896 你用的哪种通信模式呢,单独发帖看看