[FishBot教程] 9.0.6. 雷达驱动及建图测试
-
@1141682555 资料和教程中应该有强调,不要用手机的
-
建图时会出现地图重叠的问题,而且laser_frame和base_link坐标系会脱离这是什么问题造成的啊
-
在执行
sudo xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser出现了下面的错误
No protocol specified xhost: unable to open display ":10.0"配置都正常,雷达也在运行状态,可以ping通
-
@2462331351 这个和显示相关,如果显示正常可以忽略
-
@小鱼 有这个镜像的DockerFile吗,我想要重新构建ARM平台的镜像可以给我一下吗
-
@2462331351 这个时间太久了,我自己都找不到了,不过你可以到dockerhub,那里能看到镜像的构建命令
-
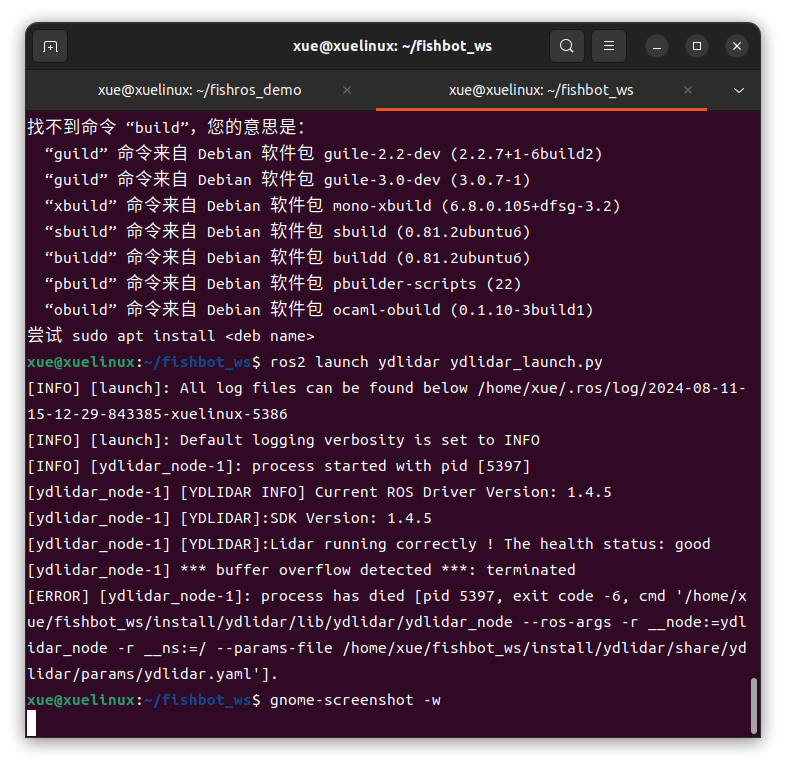
无线驱动雷达,一开始可以
当我看到移动小车建图时,运行驱动这个雷达就又不行了
之后重启,单独运行无线驱动雷达就一直是旁边这个报错了 -
@1281857896 用我做好的docker镜像测试过没
-
@小鱼 用docker可以的
-
@1281857896 你用的哪种通信模式呢,单独发帖看看
-
@小鱼 !
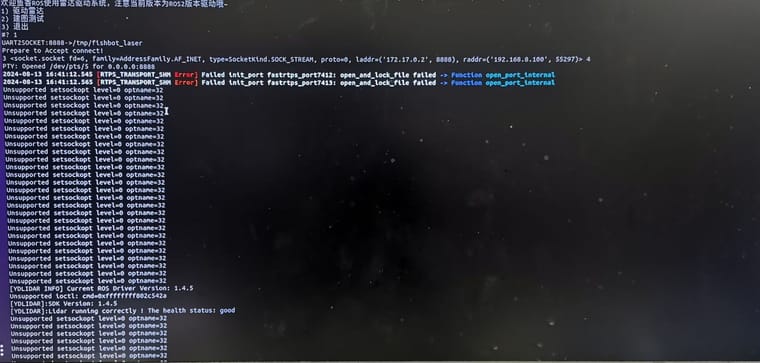
这个错误看不懂,是哪里出了问题? -
-
@小鱼 是ubuntu20.04 ros2 foxy
-
@447622663 建议换成humble版本,ubuntu22.04哈,不然后续导航还会遇到问题
-
@小鱼 Cannot connect to the Docker daemon at unix:///var/run/docker.sock. Is the docker daemon running?
我重新安装了humble后,用docker的时候(用配置助手的时候)出现了上面这段。(后来docker重启过)。
用的是一键安装docker代理,服务模式(代理服务器默认的那几个都换过,现在用的是https://dockerhub.azk8s.cn")。 -
@447622663 docker挂掉了,你先清除下docker的代理配置吧,感觉是配置有错误
-
@1281857896 xue@xuelinux:~$ ping 192.168.1.107
PING 192.168.1.107 (192.168.1.107) 56(84) bytes of data.
64 bytes from 192.168.1.107: icmp_seq=1 ttl=255 time=4.88 ms
64 bytes from 192.168.1.107: icmp_seq=2 ttl=255 time=5.63 ms
64 bytes from 192.168.1.107: icmp_seq=3 ttl=255 time=9.29 ms
64 bytes from 192.168.1.107: icmp_seq=4 ttl=255 time=4.04 ms
64 bytes from 192.168.1.107: icmp_seq=5 ttl=255 time=4.92 ms
64 bytes from 192.168.1.107: icmp_seq=6 ttl=255 time=6.85 ms
64 bytes from 192.168.1.107: icmp_seq=7 ttl=255 time=6.87 ms
64 bytes from 192.168.1.107: icmp_seq=8 ttl=255 time=5.01 ms
64 bytes from 192.168.1.107: icmp_seq=9 ttl=255 time=13.4 ms
64 bytes from 192.168.1.107: icmp_seq=10 ttl=255 time=3.34 ms
^[^A64 bytes from 192.168.1.107: icmp_seq=11 ttl=255 time=5.95 ms
64 bytes from 192.168.1.107: icmp_seq=12 ttl=255 time=6.10 ms
64 bytes from 192.168.1.107: icmp_seq=13 ttl=255 time=9.15 ms
64 bytes from 192.168.1.107: icmp_seq=14 ttl=255 time=10.4 ms -
@1281857896 这是到雷达板
-
@1281857896 速度还可以,看看rqt-tf-tree
-
@小鱼 ros2 topic hz /scan 也看看