@小鱼 但是在前面使用机器人建模的时候还是使用到了gazebo来加载urdf,还得用到gazebo_ros_pkgs,所以这个有平替的方案嘛。比如用ignition。
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
2761607729 发布的帖子
-
RE: gazebo_ros_pkgs无法在基于arm架构的ubuntu安装发布在 综合问题
-
gazebo_ros_pkgs无法在基于arm架构的ubuntu安装发布在 综合问题
gazebo_ros_pkgs无法在基于arm架构的ubuntu安装
问题描述:
将一个基于amd的ubuntu22.04版本的ros2-humble系统上的功能包(小鱼跟着动手学ros的文档完成的)移植到基于arm的ubuntu22.04版本的ros2-humble系统上,编译报错如下:
CMake Error at CMakeLists.txt:17 (find_package): By not providing "Findgazebo_ros_pkgs.cmake" in CMAKE_MODULE_PATH this project has asked CMake to find a package configuration file provided by "gazebo_ros_pkgs", but CMake did not find one. Could not find a package configuration file provided by "gazebo_ros_pkgs" with any of the following names: gazebo_ros_pkgsConfig.cmake gazebo_ros_pkgs-config.cmake Add the installation prefix of "gazebo_ros_pkgs" to CMAKE_PREFIX_PATH or set "gazebo_ros_pkgs_DIR" to a directory containing one of the above files. If "gazebo_ros_pkgs" provides a separate development package or SDK, be sure it has been installed.具体细节和上下文:
我看了一下终端的报错信息是在github下载的navigation2中的nav2_system_tests中有依赖gazebo_ros_pkgs,但是我运行这个sudo apt install ros-humble-gazebo-*指令,
注意,根据Glob 'ros-humble-gazebo-*' 选中了 'ros-humble-gazebo-model-attachment-plugin-msgs-dbgsym' 注意,根据Glob 'ros-humble-gazebo-*' 选中了 'ros-humble-gazebo-video-monitor-interfaces' 注意,根据Glob 'ros-humble-gazebo-*' 选中了 'ros-humble-gazebo-model-attachment-plugin-msgs' 注意,根据Glob 'ros-humble-gazebo-*' 选中了 'ros-humble-gazebo-msgs-dbgsym' 注意,根据Glob 'ros-humble-gazebo-*' 选中了 'ros-humble-gazebo-dev' 注意,根据Glob 'ros-humble-gazebo-*' 选中了 'ros-humble-gazebo-video-monitor-utils' 注意,根据Glob 'ros-humble-gazebo-*' 选中了 'ros-humble-gazebo-video-monitor-interfaces-dbgsym' 注意,根据Glob 'ros-humble-gazebo-*' 选中了 'ros-humble-gazebo-msgs'仅下载了这些包,并没有gazebo_ros_pkgs这个包,是不是这个不支持在arm下载。
这个该怎么解决。或者如果我不使用gazebo而是ignition来替代,那这个navigiton2中的nav2_system_tests依赖的gazebo_ros-pkgs又该怎么处理。
-
gazebo_ros_pkgs无法在基于arm架构的linux安装发布在 综合问题
标题:gazebo_ros_pkgs无法在基于arm架构的linux安装
问题描述:将一个基于amd的linux系统上的一个功能包移植到arm的linux系统上在编译的时候报错,提示依赖项gazebo_ros_pkgs未找到,尝试安装无法定位到gazebo_ros_pkgs。这个该怎么解决,或者有什么平替的方法。
-
RE: 安装gazebo报错,无法找到包 ros-humble-gazebo-ros发布在 综合问题
@小鱼 我也碰到了类似的问题,现在用的是arm架构的虚拟机,安装不了gazebo_ros_pkgs,但是navigation2功能包中的nav2_system_tests中有gazebo_ros_pkgs的依赖,编译出错,怎么解决。
-
RE: Fishbot-humble源码编译错误发布在 FishBot机器人
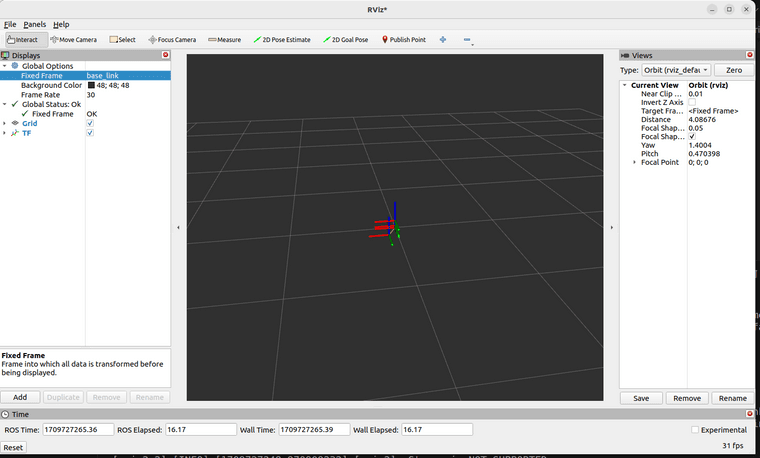
@小鱼 那意思是这个humble版本还是有问题的吗,我编译后运行第一个指令显示机器人模型ros2 launch fishbot_description display_rviz2.launch.py,看不见机器人,但是添加tf坐标系有显示。
-
RE: Fishbot-humble源码编译错误发布在 FishBot机器人
@小鱼 我试了好多次都没解决,那个rosdep提示缺少ament_python的依赖项,我也给安装上了,但是还是报错。我根据这个报错的原因,将cartographer_ros包下面的ros_log_sink.cpp文件中的
const std::string message_string = ::google::LogSink::ToString(
severity, GetBasename(filename), line, tm_time, message, message_len);
中的tm_time改成*tm_time后编译通过了 -
RE: Fishbot-humble源码编译错误发布在 FishBot机器人
@小鱼 我又重新安装了一遍,先是git clone --recursive https://github.com/fishros/fishbot.git -b humble
然后按照你的提示将.gitmodules文件改成
[submodule "src/navigation"]
path = src/navigation
url = http://github.fishros.org/https://github.com/fishros/navigation2.git
branch = humble[submodule "src/cartographer_code/cartographer"]
path = src/cartographer_code/cartographer
url = http://github.fishros.org/https://github.com/ros2/cartographer.git
branch = humble[submodule "src/cartographer_code/cartographer_ros"]
path = src/cartographer_code/cartographer_ros
url = http://github.fishros.org/https://github.com/ros2/cartographer_ros.git
branch = humble
接着在工作空间运行git summodule init 和 git submodule update --recursive更新子模块的内容,在conlcon build编译还是报错,还是同样的情况,但是在colcon build编译前我运行那个rosdep install --from-paths src -y
也是报错报ERROR: the following packages/stacks could not have their rosdep keys resolved
to system dependencies:
fishbot_description: Cannot locate rosdep definition for [ament_python]
我就直接跳过了,不知道有没有影响 -
RE: humble编译 FishBot主仓库-https://github.com/fishros/fishbot 代码报错发布在 FishBot机器人
@小鱼 具体怎么安装,是直接安装cartographer_ros这个功能包嘛
-
humble编译 FishBot主仓库-https://github.com/fishros/fishbot 代码报错发布在 FishBot机器人
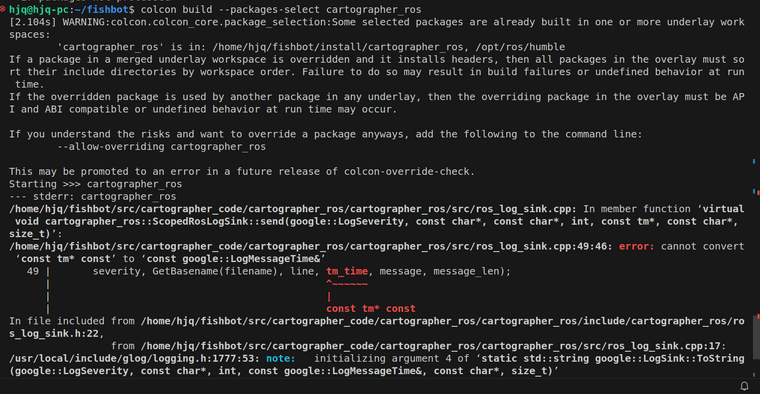
在编译到cartographer_ros功能包时报错
[1.697s] WARNING:colcon.colcon_core.package_selection:Some selected packages are already built in one or more underlay workspaces:
'cartographer_ros' is in: /home/hjq/fishbot/install/cartographer_ros, /opt/ros/humble
If a package in a merged underlay workspace is overridden and it installs headers, then all packages in the overlay must sort their include directories by workspace order. Failure to do so may result in build failures or undefined behavior at run time.
If the overridden package is used by another package in any underlay, then the overriding package in the overlay must be API and ABI compatible or undefined behavior at run time may occur.If you understand the risks and want to override a package anyways, add the following to the command line:
--allow-overriding cartographer_rosThis may be promoted to an error in a future release of colcon-override-check.
Starting >>> cartographer_ros
--- stderr: cartographer_ros
/home/hjq/fishbot/src/cartographer_code/cartographer_ros/cartographer_ros/src/ros_log_sink.cpp: In member function ‘virtual void cartographer_ros::ScopedRosLogSink::send(google::LogSeverity, const char*, const char*, int, const tm*, const char*, size_t)’:
/home/hjq/fishbot/src/cartographer_code/cartographer_ros/cartographer_ros/src/ros_log_sink.cpp:49:46: error: cannot convert ‘const tm* const’ to ‘const google::LogMessageTime&’
49 | severity, GetBasename(filename), line, tm_time, message, message_len);
| ^~~~~~~
| |
| const tm* const
In file included from /home/hjq/fishbot/src/cartographer_code/cartographer_ros/cartographer_ros/include/cartographer_ros/ros_log_sink.h:22,
from /home/hjq/fishbot/src/cartographer_code/cartographer_ros/cartographer_ros/src/ros_log_sink.cpp:17:
/usr/local/include/glog/logging.h:1777:53: note: initializing argument 4 of ‘static std::string google::LogSink::ToString(google::LogSeverity, const char*, int, const google::LogMessageTime&, const char*, size_t)’
1777 | const LogMessageTime &logmsgtime,
| ~~~~~~~~~~~~~~^
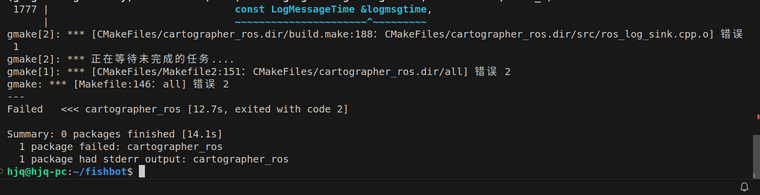
gmake[2]: *** [CMakeFiles/cartographer_ros.dir/build.make:188:CMakeFiles/cartographer_ros.dir/src/ros_log_sink.cpp.o] 错误 1
gmake[2]: *** 正在等待未完成的任务....
gmake[1]: *** [CMakeFiles/Makefile2:151:CMakeFiles/cartographer_ros.dir/all] 错误 2
gmake: *** [Makefile:146:all] 错误 2****************************Failed <<< cartographer_ros [13.5s, exited with code 2]
Summary: 0 packages finished [14.7s]
1 package failed: cartographer_ros
1 package had stderr output: cartographer_ros -
RE: Fishbot-humble源码编译错误发布在 FishBot机器人
@小鱼 就fishbot的代码https://github.com/fishros/fishbot/tree/humble,humble版本的