[FishBot教程]9.0.7. FishBot-Nav2导航测试
-
-
@小鱼 第二步能正常运行,就是bringup时,接收不到tf的消息
-
此回复已被删除! -
@2940867840 ros2 topic echo /odom 有没有数据呢
-
@小鱼
 可以看到数据
可以看到数据 -
@2940867840 贴上launch文件单独发个帖子吧,不要截图
-
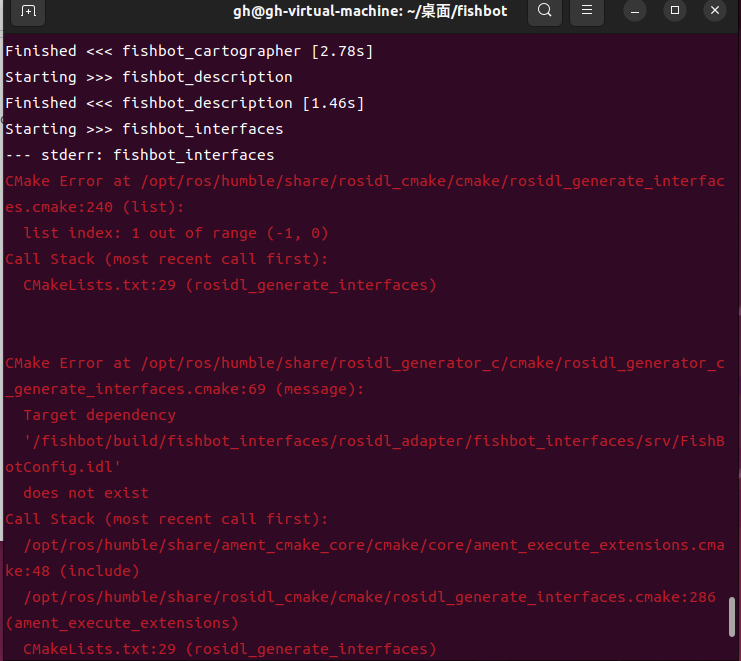
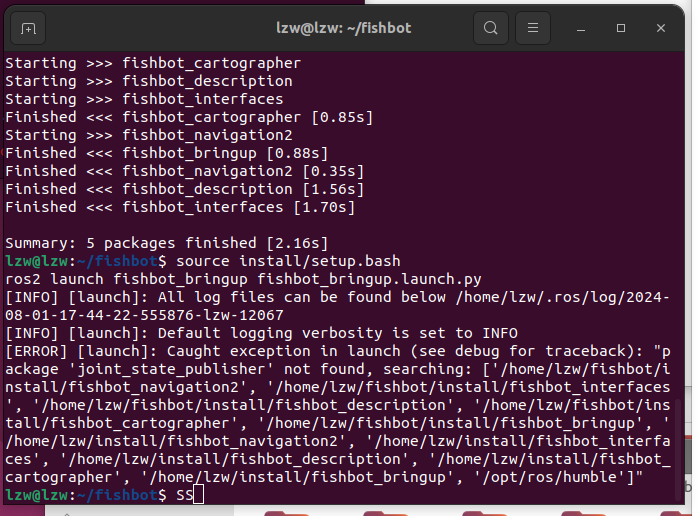
在colcon build的时候 bringup功能包报错是因为什么啊? -

运行bringup功能包的时候报错 joint_state_publisher不存在怎么解决啊 -
@1141682555 在 [FishBot教程]7. FishBot-Nav2导航测试 中说:
运行bringup功能包的时候报错 joint_state_publisher不存在怎么解决啊@小伊 ros2 humble 下出现的问题,用apt怎么安装
-
sudo apt install ros-humble-joint-state-publisher
以上为生成回答,仅供参考~
-
在做nav2导航测试,为什么有个标识车辆位置的点在图外。左下角的位置。是否中间什么点错了?
目前目标位置,车子可以正常过去。
有时发现车子检测的位置和地图不匹配,有方向偏移或位置偏移,这个如何矫正。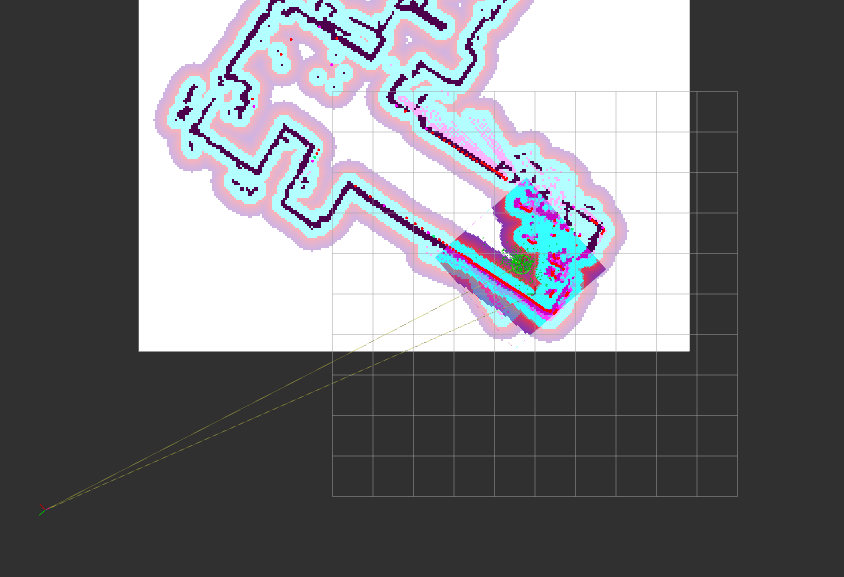
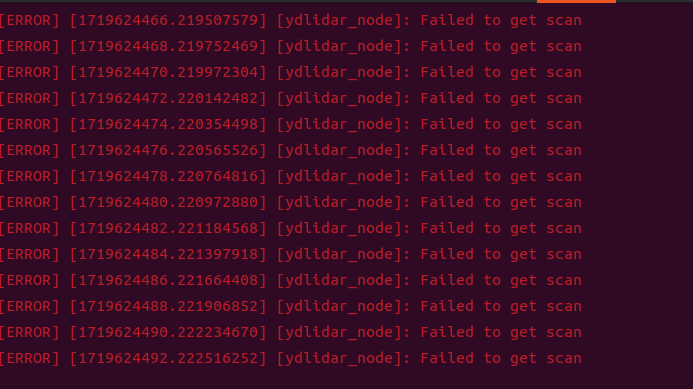
发现的其他问题1:
过一段时间雷达会超时(时间不固定ctr+C,退出,重新选1驱动雷达。数据会正常。l
发现的其他问题2:
rviz2中雷达数据和小车状态不更新,提示queue is full
处理方式:关闭rviz2,重新启动程序ros2 launch fishbot_navigation2 navigation2.launch.py
file:///home/mengl/%E5%9B%BE%E7%89%87/%E6%88%AA%E5%9B%BE/%E6%88%AA%E5%9B%BE%202024-06-28%2010-40-07.png -
@15724948 在 [FishBot教程]7. FishBot-Nav2导航测试 中说:
为什么有个标识车辆位置的点在图外。左下角的位置。是否中间什么点错了
左下角是odom转换正常,雷达这边考虑网络问题
-
@小鱼 在 [FishBot教程]7. FishBot-Nav2导航测试 中说:
@小鱼 在 [FishBot教程]7. FishBot-Nav2导航测试 中说:
rosdep install --from-paths src --ignore-src -y -r # 安装依赖
这一步,先跑一次一键安装
-
@小鱼
 安装过了,最后还是这样。
安装过了,最后还是这样。 -
此回复已被删除! -
@lzw 下次最好单独提问,不然容易看不到帖子。
这个问题之前应该出现过,提示缺少的那个包装一下就好(最好复制粘贴错误,我也好复制粘贴给你命令)
@小鱼 在 [FishBot教程]7. FishBot-Nav2导航测试 中说:
1.请使用ubuntu22.04 系统 2.请安装 joint_state_publisher
就是这里
sudo apt install ros-humble-joint-state-publisher
-
跟着文字做到第五步导航测试时输入命令出现以下错误:
版本为22.04
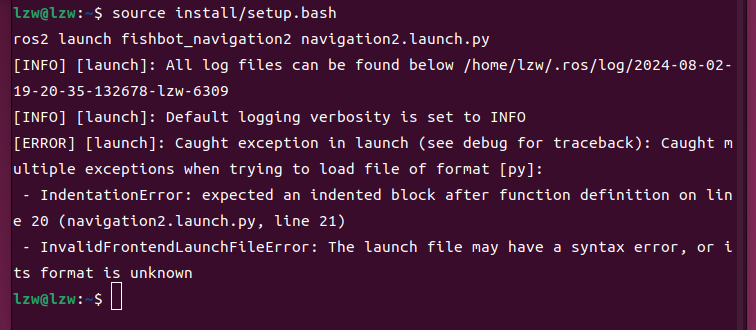
[INFO] [launch]: All log files can be found below /home/lzw/.ros/log/2024-08-02-19-20-35-132678-lzw-6309
[INFO] [launch]: Default logging verbosity is set to INFO
[ERROR] [launch]: Caught exception in launch (see debug for traceback): Caught multiple exceptions when trying to load file of format [py]:- IndentationError: expected an indented block after function definition on line 20 (navigation2.launch.py, line 21)
- InvalidFrontendLaunchFileError: The launch file may have a syntax error, or its format is unknown
-
@lzw 工作空间不对,你的目录在主目录了,应该到工作空间下执行
-
我在拉取项目,也就是文中第二个命令时,出现了下面的错误:正克隆到 'fishbot'...
remote: Enumerating objects: 84, done.
remote: Counting objects: 100% (84/84), done.
remote: Compressing objects: 100% (69/69), done.
remote: Total 84 (delta 21), reused 46 (delta 7), pack-reused 0 (from 0)
接收对象中: 100% (84/84), 332.98 KiB | 1.06 MiB/s, 完成.
处理 delta 中: 100% (21/21), 完成.
子模组 'src/cartographer_code/cartographer'(https://github.91chi.fun/https://github.com/ros2/cartographer.git)已对路径 'src/cartographer_code/cartographer' 注册
子模组 'src/cartographer_code/cartographer_ros'(https://github.91chi.fun/https://github.com/ros2/cartographer_ros.git)已对路径 'src/cartographer_code/cartographer_ros' 注册
子模组 'src/navigation'(https://github.91chi.fun/https://github.com/fishros/navigation2.git)已对路径 'src/navigation' 注册
正克隆到 '/home/zdd/fishbot/src/cartographer_code/cartographer'...
fatal: 无法访问 'https://github.91chi.fun/https://github.com/ros2/cartographer.git/':gnutls_handshake() failed: Error in the pull function.
fatal: 无法克隆 'https://github.91chi.fun/https://github.com/ros2/cartographer.git' 到子模组路径 '/home/zdd/fishbot/src/cartographer_code/cartographer'
克隆 'src/cartographer_code/cartographer' 失败。按计划重试
正克隆到 '/home/zdd/fishbot/src/cartographer_code/cartographer_ros'...希望鱼哥解答一下 -
@2462331351 换个github代理试试