ros2机器人foxy版用笔记本摄像头跑单目orb_slam3
-
@毛哥成山轮胎机油保养 你好,我用的是galactic版本,步骤一样但在编译ROS2包的时候会报错:
/usr/bin/ld: /home/turtlebot/origin_slam/ORB_SLAM3/lib/libORB_SLAM3.so: undefined reference toDUtils::Random::RandomInt(int, int)' /usr/bin/ld: /home/turtlebot/origin_slam/ORB_SLAM3/lib/libORB_SLAM3.so: undefined reference toDUtils::Random::SeedRandOnce()'
/usr/bin/ld: /home/turtlebot/origin_slam/ORB_SLAM3/lib/libORB_SLAM3.so: undefined reference toDUtils::Random::SeedRandOnce(int)' /usr/bin/ld: /home/turtlebot/origin_slam/ORB_SLAM3/lib/libORB_SLAM3.so: undefined reference toDBoW2::FORB::L'
请问你遇到过这个问题么 -
@SciMaker 按你的提示应该是缺少libORB_SLAM3.so这个文件,你搜一下这个文件看看你机子里面有吗,有的话把他复制到/usr/lib/文件夹下。
搜索命令:sudo find / -name libORB_SLAM3.so -
@毛哥成山轮胎机油保养 在 ros2机器人foxy版用笔记本摄像头跑单目orb_slam3 中说:
zang09
xin@MOSS:~/Code/Test$ colcon build --symlink-install --packages-select orbslam3 Starting >>> orbslam3 --- stderr: orbslam3 Traceback (most recent call last): File "/opt/ros/rolling/share/ament_cmake_core/cmake/package_templates/templates_2_cmake.py", line 21, in <module> from ament_package.templates import get_environment_hook_template_path ModuleNotFoundError: No module named 'ament_package' CMake Error at /opt/ros/rolling/share/ament_cmake_core/cmake/ament_cmake_package_templates-extras.cmake:41 (message): execute_process(/usr/bin/python3.10 /opt/ros/rolling/share/ament_cmake_core/cmake/package_templates/templates_2_cmake.py /home/xin/Code/Test/build/orbslam3/ament_cmake_package_templates/templates.cmake) returned error code 1 Call Stack (most recent call first): /opt/ros/rolling/share/ament_cmake_core/cmake/ament_cmake_coreConfig.cmake:41 (include) /opt/ros/rolling/share/ament_cmake/cmake/ament_cmake_export_dependencies-extras.cmake:15 (find_package) /opt/ros/rolling/share/ament_cmake/cmake/ament_cmakeConfig.cmake:41 (include) CMakeLists.txt:18 (find_package) --- Failed <<< orbslam3 [0.32s, exited with code 1] Summary: 0 packages finished [0.42s]我编译的时候遇到这个问题,可以帮我看看吗
-
-
@毛哥成山轮胎机油保养 谢谢回复,我的设备中是有个文件的,目前通过改写CMakelists把路径加进去了,问题解决了啦
-
Starting the Viewer
[ros2run]: Segmentation fault
最后一步的时候会这样,是什么原因 -
@2689324574 程序跑起来了吗?
-
此回复已被删除! -
此回复已被删除! -
你好 出现这种错 这是沙玩意儿 -
@1157354382 你这是跑的单目的程序,需要启动摄像头的,你的主程序已经启动,正在等你的摄像头数据,如果你的摄像头已经启动了,那要检查摄像头发布的话题和你的主程序接收的话题是否一致
ros2 topic list 查看话题 -
@毛哥成山轮胎机油保养 是的 这些我都修改好了,好奇怪
-
@毛哥成山轮胎机油保养 我看了一眼里面的代码,好像执行到这一步就没了好像是直接死掉了

后面哪怕我加了 cout 也不显示,但是我用 ./运行 exalmple,就能正常显示,我不懂啊

-
@1157354382 m@ubun:~$ ros2 run orbslam3 mono ~/ORB_SLAM3/Vocabulary/ORBvoc.txt ~/ORB_SLAM3/Examples/Monocular/RealSense_D435i.yaml
ORB-SLAM3 Copyright (C) 2017-2020 Carlos Campos, Richard Elvira, Juan J. Gómez, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
ORB-SLAM2 Copyright (C) 2014-2016 Raúl Mur-Artal, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
This program comes with ABSOLUTELY NO WARRANTY;
This is free software, and you are welcome to redistribute it
under certain conditions. See LICENSE.txt.Input sensor was set to: Monocular
Loading settings from /home/m/ORB_SLAM3/Examples/Monocular/RealSense_D435i.yaml
Camera1.k3 optional parameter does not exist...
-Loaded camera 1
Camera.newHeight optional parameter does not exist...
Camera.newWidth optional parameter does not exist...
-Loaded image info
-Loaded ORB settings
Viewer.imageViewScale optional parameter does not exist...
-Loaded viewer settings
System.LoadAtlasFromFile optional parameter does not exist...
System.SaveAtlasToFile optional parameter does not exist...
-Loaded Atlas settings
System.thFarPoints optional parameter does not exist...
-Loaded misc parametersSLAM settings:
-Camera 1 parameters (Pinhole): [ 382.613 382.613 320.183 236.455 ]
-Camera 1 distortion parameters: [ 0 0 0 0 ]
-Original image size: [ 640 , 480 ]
-Current image size: [ 640 , 480 ]
-Sequence FPS: 30
-Features per image: 1250
-ORB scale factor: 1.2
-ORB number of scales: 8
-Initial FAST threshold: 20
-Min FAST threshold: 7Loading ORB Vocabulary. This could take a while...
Vocabulary loaded!Initialization of Atlas from scratch
Creation of new map with id: 0
Creation of new map with last KF id: 0
Seq. Name:
There are 1 cameras in the atlas
Camera 0 is pinhole
slam changedStarting the Viewer
你的下一步该加载摄像头配置了,看看你的摄像头配置文件路径对吗? -
@毛哥成山轮胎机油保养 无论我是对的还是错的,都直接结束程序了,莫名其妙的,用ros2来驱动
-
 @WK%2.png" class=" img-fluid img-markdown" />
@WK%2.png" class=" img-fluid img-markdown" />
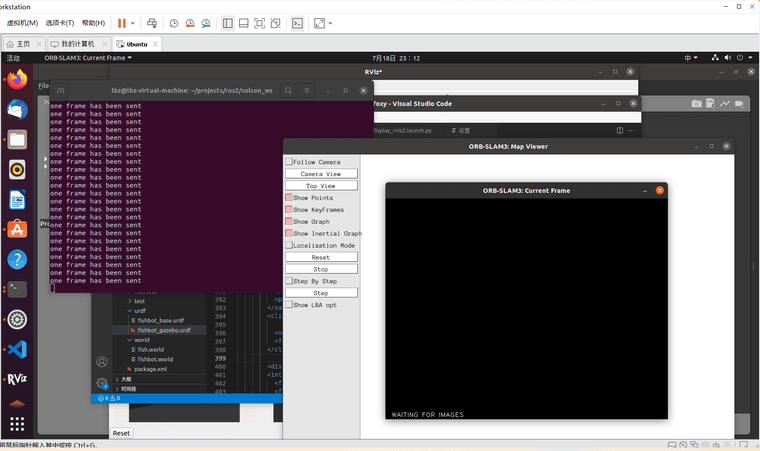
您好,wo'xian我想结合ros2——orbslam3和gazebo仿真,在订阅到图像后,在运行程序后,orbslam3也显示出来有图像接收到了,但是在可视化界面根本没有图像,这是什么原因,困扰很久了,真心想解决这个问题 -
@3532206791 你让仿真的小车移动一下,也许就会出来图像,我没有跑过仿真的,但是用实体的摄像头跑单目跑到你这个地方也卡了我很久,有一次无意中移动了一下摄像头图像就出来了。他计算第一帧和第二帧图像,如果摄像头没动,第一帧和第二帧图像是同一个图像,初始化不了,不知道你碰到的问题和我曾经碰到的问题是否一样。
-
@毛哥成山轮胎机油保养 哎,我尝试了,不管怎么动小车都没有图像显示,不知道是不是代码方面还有什么其他的问题,还是说只进行话题的订阅还不够,还需要调整其他参数?不明白
-
@毛哥成山轮胎机油保养 还是说需要用这个文件 RealSense_D435i.yaml
-
你好,我解决了无法显示图像的问题,但是新的问题又出现了,我在仿真环境下运行orbslam3很容易终止,不知道您用摄像头卡不卡,会不会很容易中断