[FishBot教程] 6. 雷达驱动及建图测试
-
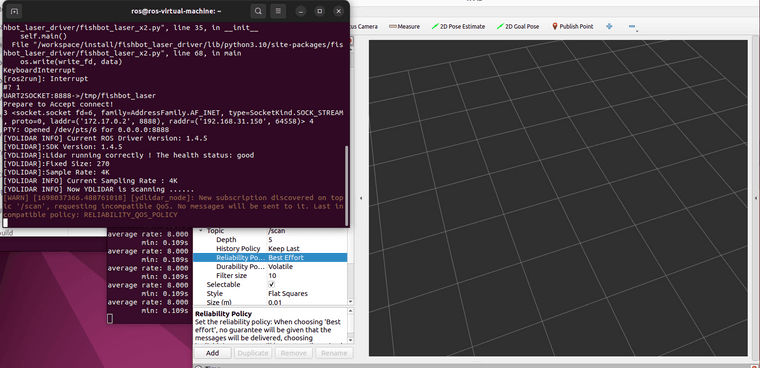
小鱼哥,我按照教程做下来的,打开可视图的时候就显示黄色字的错误,然后改成Best Effort之后,移动雷达没有出现点云数据,这是怎么回事?
-
@1740580485 这两步你为什么不做?

-
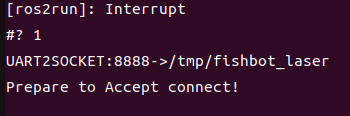
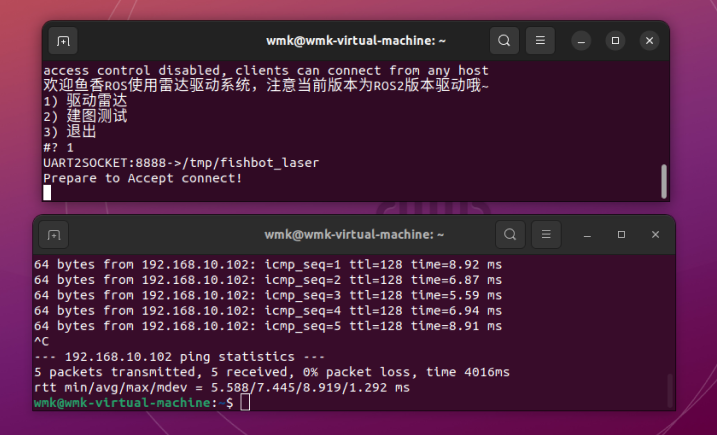
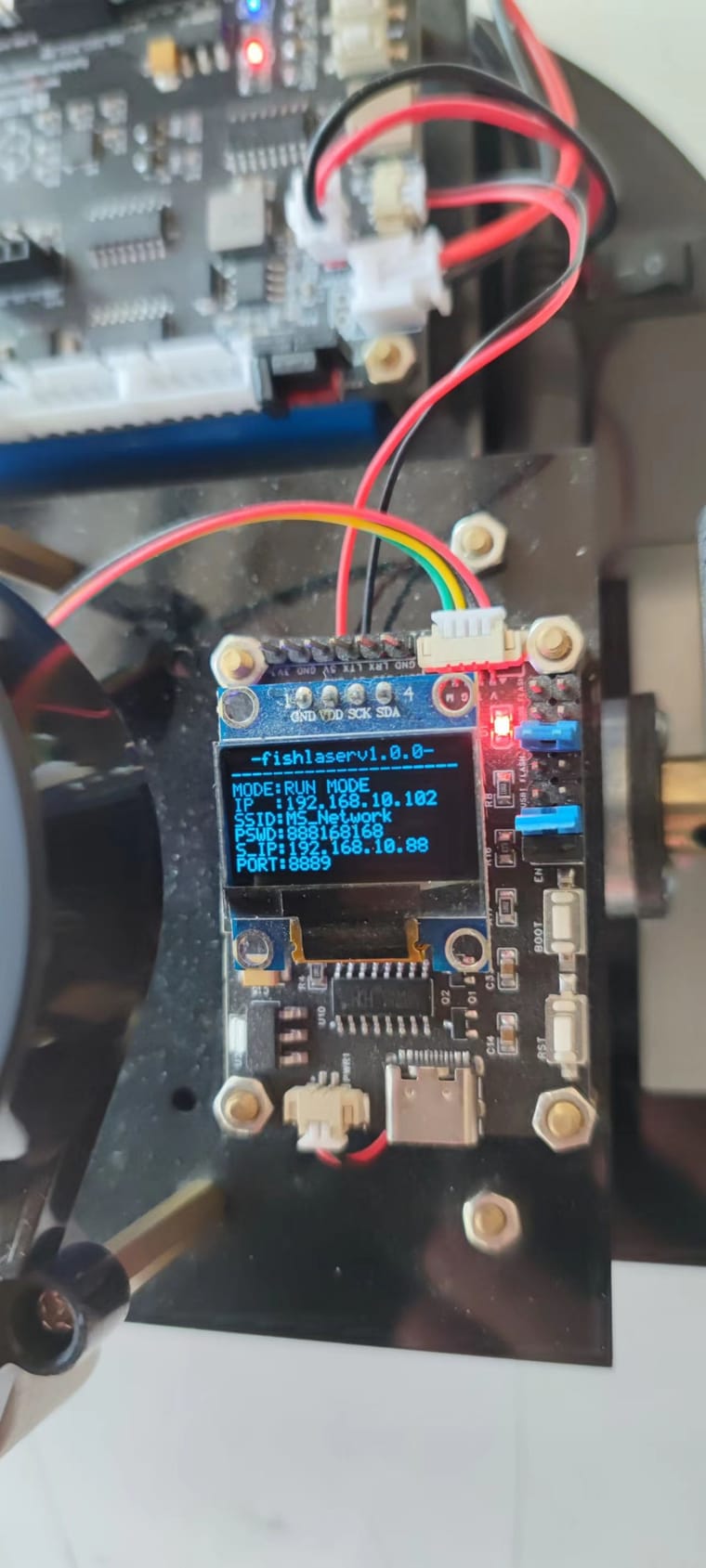
能ping通ip,但是UART2SOCKET:8888->/tmp/fishbot_laser
一直卡在Prepare to Accept connect! -
@13768252287 1.检查雷达模式 2.检查网络 客服发送的资料里有一个常见问题解答,其中讲解了网络相关的问题,能ping通不一定可以通信
-
@1461307079 我的也不能连接,桥接模式怎么设置的?VMware16 没找到虚拟网络编辑器。
-
虚拟机上运行乌班图22.04,net连接。始终无法连接成功。 -
@2826778595 找客服要一下常见问题解答视频,其实需要的网络结构很简单的
小鱼 ROS 2 新书上线!书籍购买链接: https://m.tb.cn/h.gFDBx39
新书配套视频:https://www.bilibili.com/video/BV1GW42197Ck/ -
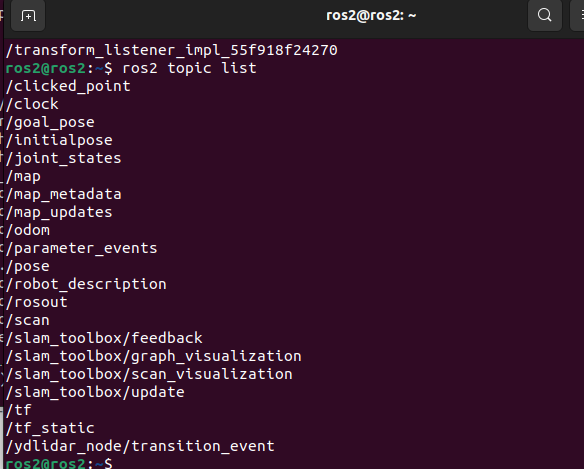
这边准备建图的时候发现cmd_vel话题突然不见了 就很奇怪
-
保存地图出现
/opt/ros/humble/lib/nav2_map_server/map_saver_cli: symbol lookup error: /opt/ros/humble/lib/libmap_server_core.so: undefined symbol: _ZN9nav2_util13LifecycleNode18on_rcl_preshutdownEv
[ros2run]: Process exited with failure 127 -
@小鱼 看到客服资料了,已经解决。谢谢。
是网络通信的问题。我是通过虚拟机装的ubantu,想让板子和电脑通信需要设置桥接模式。但是,我设置桥接无网络,所以迟迟无法实现通信。最后,通过外接固态U盘,装了双系统,重新配置后,无需桥接直接实现通信。视频资料里的问题解答,解决了几乎所有我之前我遇到的头疼问题。呜呜,发现晚了。 -
@565517830 在 [FishBot教程] 6. 雷达驱动及建图测试 中说:
保存地图出现
/opt/ros/humble/lib/nav2_map_server/map_saver_cli: symbol lookup error: /opt/ros/humble/lib/libmap_server_core.so: undefined symbol: _ZN9nav2_util13LifecycleNode18on_rcl_preshutdownEv
[ros2run]: Process exited with failure 127系统安装问题,重新装下ros2
-
@
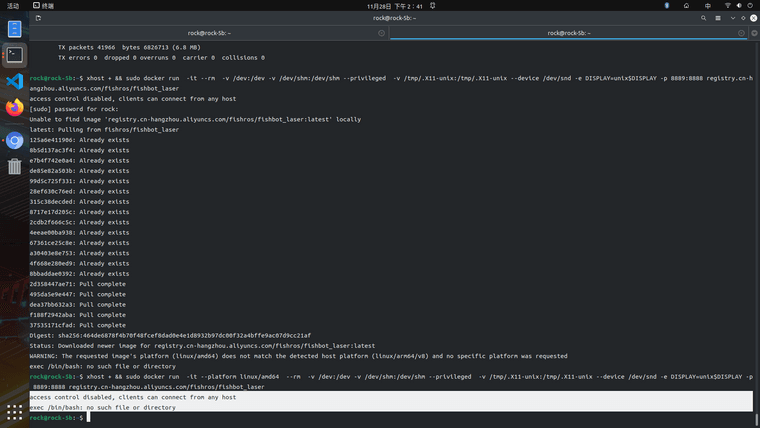
大佬我安装好docker以后一直启动不起来阿,还有之前的配置软件也是安装好无法启动。是您这提供的软件没有arm版本吗? -
@717937314 目前没有提供arm版本,如果需要请按照教程源码完成建图:
@小鱼 在 FishBot配套资料教程汇总 中说:
拓展1:FishBot配套雷达驱动教程(源码版)
拓展2:树莓派上使用micros-agent驱动主控板的方法
拓展3:FishBot 树莓派配置建图导航 -
雷达用小鱼的驱动板功能正常。我尝试用 ESP-12F为模组的ESP8266开发板 驱动雷达 出现timout count: 1提示。对照雷达驱动板原理图和ESP8266开发板引脚图后接线,
VCC 接外部电源5V
GND 接外部电源GND
TX 接ESP8266开发板RXD0
MOTOR 接ESP8266开发板GPIO4
我认为固件拷贝成功,连线正常,应该没有问题,但是提示timout count: 1,可能是什么原因导致的?
@小鱼 -
@小鱼 驱动雷达也是WIFI模式通讯不上,端口占用检查也没问题,USB通讯是正常。 -
@164982458 板子和电脑无法通信,是虚拟机运行系统吗?如果是,需要桥接。与网络也有关系,建议找客服要常见问题汇总的视频讲解。2826778595我的QQ,可以交流以下。
-
@2826778595 是虚拟机,用的桥接模式,端口占用也检查正常。
-
@2826778595 已解决这个问题,IP地址配置错误造成。
-
ping 正常 虚拟机也设置桥街模式 IP设置也正确 为什么还是连接不上呢?!
-
@anzg512 参考这个视频看一下, FishBot常见问题汇总:
链接:https://pan.baidu.com/s/14NKr0QLTnlWwcbUg97IFBQ?pwd=fish