agent 手动编译,不用docker,以及树莓派上使用micros-agent的方法
-

这边使用fishbot 执行无线的那个命令 缺少参数 是要加哪个参数吗 -
上边不是有写吗
@小鱼 在 agent 手动编译,不用docker,以及树莓派上使用micros-agent的方法 中说:
ros2 run micro_ros_agent micro_ros_agent serial -b 921600 --dev /dev/ttyUSB0 -v
-
上边不是有写吗
在 agent 手动编译,不用docker,以及树莓派上使用micros-agent的方法 中说:ros2 run micro_ros_agent micro_ros_agent serial -b 921600 --dev /dev/ttyUSB0 -v
-
@小鱼 jetson nano的镜像是基于Ubuntu 20.04的,可以使用一键安装脚本安装ros2 humble么,还是只能源码编译才行?
-
@twtddv 可以用docker
-
此回复已被删除! -
@515261725 提供下你的上下文
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。 -
 小 小鱼 在 中 引用了 这个主题
小 小鱼 在 中 引用了 这个主题
-
小 小鱼 在 中 引用了 这个主题
-
鱼哥,我是根据您项目总结的源代码自己烧录文件到主控板的,我用启动串口的agent后,一直在重复打印这几句话,有odom话题,但ros2 topic echo /odom也没反应,是什么原因呀
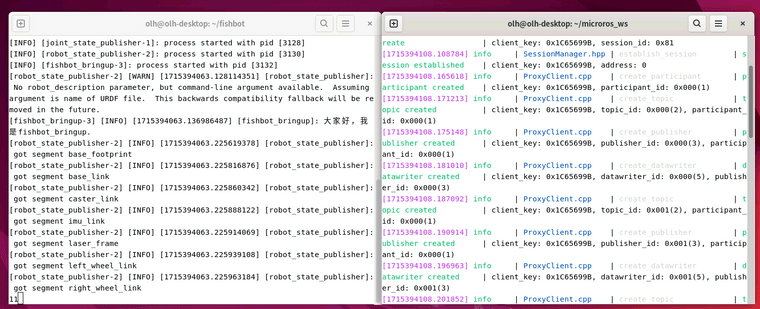 !
!
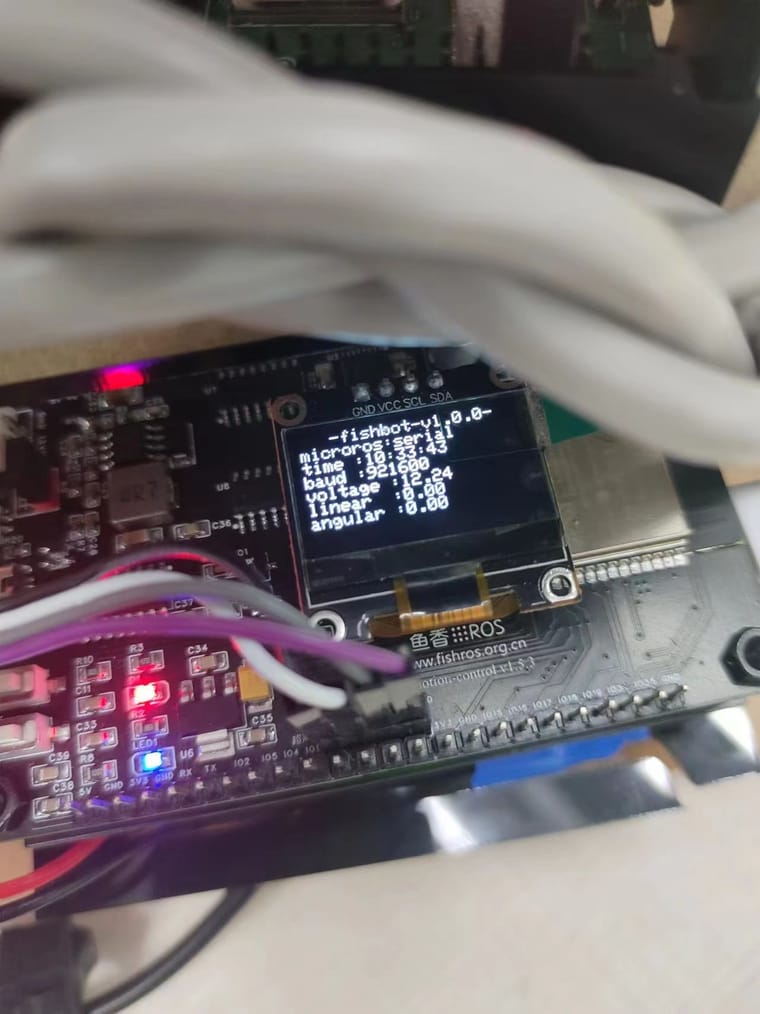
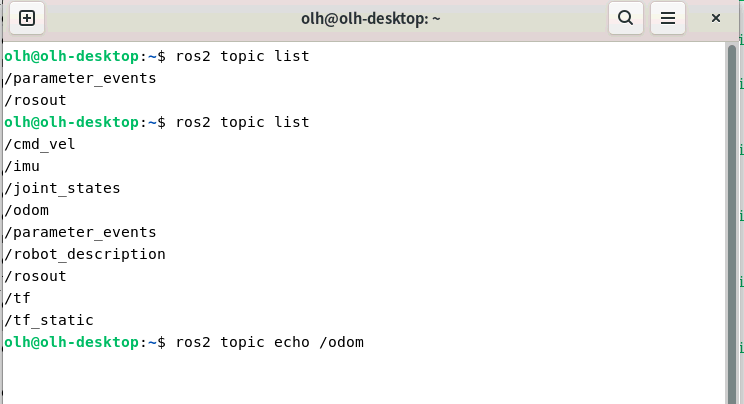 我看下面有人有类似的问题,但他是电源电压低,我的电压正常
我看下面有人有类似的问题,但他是电源电压低,我的电压正常
-
小 小鱼 在 中 引用了 这个主题
-
小 小鱼 在 中 引用了 这个主题
-
小 小鱼 在 中 引用了 这个主题
-
小 小鱼 在 中 引用了 这个主题
-
@小鱼 使用fishbot小车时,拉去不下来micros-agent,使用这个方法在编译时出现以下问题。
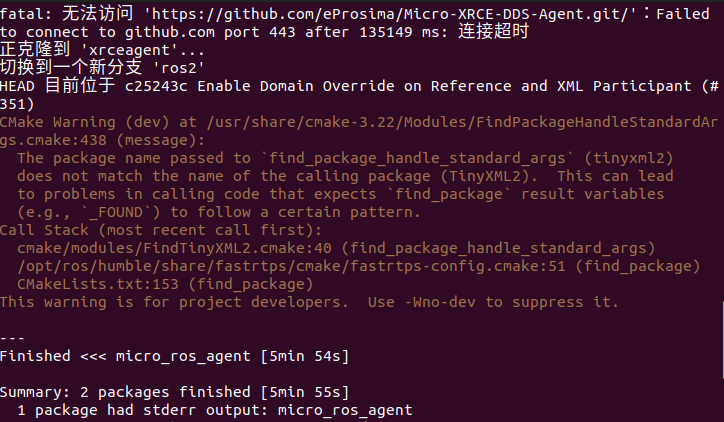
- 出现如图的警告:
CMake Warning (dev) at /usr/share/cmake-3.22/Modules/FindPackageHandleStandardArgs.cmake:438 (message): The package name passed to `find_package_handle_standard_args` (tinyxml2) does not match the name of the calling package (TinyXML2). This can lead to problems in calling code that expects `find_package` result variables (e.g., `_FOUND`) to follow a certain pattern. Call Stack (most recent call first): cmake/modules/FindTinyXML2.cmake:40 (find_package_handle_standard_args) /opt/ros/humble/share/fastrtps/cmake/fastrtps-config.cmake:51 (find_package) CMakeLists.txt:153 (find_package) This warning is for project developers. Use -Wno-dev to suppress it. --- Finished <<< micro_ros_agent [5min 54s]2.运行时,使用以下代码出现
Package 'micro_ros_agent' not found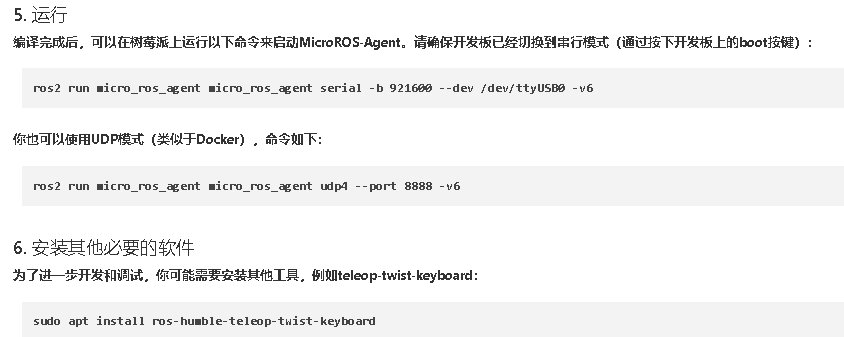
-
@414115309 使用魔法上网也拉不下来,怎么办
-
@414115309 开代理一定要设置终端代理,终端默认是不代理的
-
@小鱼 麻烦问一下,怎么开启终端代理的
-
@414115309 类似于这个提示:
已发出 HTTP 请求,正在等待回应... 200 OK 长度: 未指定 [text/plain] 正在保存至: ‘/home/fishros/.config/clash/config.yaml’ /home/fishros/.conf [ <=> ] 29.23K --.-KB/s 用时 0s 2024-06-12 10:24:43 (213 MB/s) - ‘/home/fishros/.config/clash/config.yaml’ 已保存 [29928] 文件已存在,无需下载。 =============================================== 终端通过环境变量设置: export http_proxy=http://127.0.0.1:7890 && export https_proxy=http://127.0.0.1:7890 配置系统默认代理方式: 系统设置->网络->网络代理->手动->HTTP(127.0.0.1 7890)->HTTPS(127.0.0.1 7890) 管理页面方法:https://fishros.org.cn/forum/topic/668 ============================================== INFO[0000] Start initial compatible provider Auto INFO[0000] Start initial compatible provider Proxy -
@414115309 我已经修改教程中所使用的软件源,可以再次尝试
-
小 小鱼 在 中 引用了 这个主题
-
@2524167316 楼主,解决了嘛?什么原因呀?
-
手动编译agent成功,运行时提示
Package 'micro_ros_agent' not found

-
@15724948 已经好了,环境变量问题
多运行一条指定环境变量的指令, source /home/用户名/microros_ws/install/local_setup.bash -
此回复已被删除! -
L liajun 在 中 引用了 这个主题
-
@yjjsnles 楼主解决了吗,是什么原因啊
-
标题:树莓派4B作上位机建图失败
问题描述:
我是把树莓派4B当作上位机来控制小车,都是用串口进行通信,树莓派的系统是Ubuntu22.04,ros2是humble版本,将四驱主控板和雷达转接板驱动配置好后,进行建图时失败。
具体细节和上下文:
- 雷达刚开始正常运行:


- 运行ros2 run micro_ros_agent micro_ros_agent serial -b 921600 --dev /dev/ttyUSB0 -v6后

单独进行键盘操控时也正常


所以我认为应该是供电不足问题,我该怎么解决。
- 雷达刚开始正常运行: