agent 手动编译,不用docker,以及树莓派上使用micros-agent的方法
-
@小鱼 麻烦问一下,怎么开启终端代理的
-
@414115309 类似于这个提示:
已发出 HTTP 请求,正在等待回应... 200 OK 长度: 未指定 [text/plain] 正在保存至: ‘/home/fishros/.config/clash/config.yaml’ /home/fishros/.conf [ <=> ] 29.23K --.-KB/s 用时 0s 2024-06-12 10:24:43 (213 MB/s) - ‘/home/fishros/.config/clash/config.yaml’ 已保存 [29928] 文件已存在,无需下载。 =============================================== 终端通过环境变量设置: export http_proxy=http://127.0.0.1:7890 && export https_proxy=http://127.0.0.1:7890 配置系统默认代理方式: 系统设置->网络->网络代理->手动->HTTP(127.0.0.1 7890)->HTTPS(127.0.0.1 7890) 管理页面方法:https://fishros.org.cn/forum/topic/668 ============================================== INFO[0000] Start initial compatible provider Auto INFO[0000] Start initial compatible provider Proxy -
@414115309 我已经修改教程中所使用的软件源,可以再次尝试
-
 小 小鱼 在 中 引用了 这个主题
小 小鱼 在 中 引用了 这个主题
-
@2524167316 楼主,解决了嘛?什么原因呀?
-
手动编译agent成功,运行时提示
Package 'micro_ros_agent' not found

-
@15724948 已经好了,环境变量问题
多运行一条指定环境变量的指令, source /home/用户名/microros_ws/install/local_setup.bash -
此回复已被删除! -
L liajun 在 中 引用了 这个主题
-
@yjjsnles 楼主解决了吗,是什么原因啊
-
标题:树莓派4B作上位机建图失败
问题描述:
我是把树莓派4B当作上位机来控制小车,都是用串口进行通信,树莓派的系统是Ubuntu22.04,ros2是humble版本,将四驱主控板和雷达转接板驱动配置好后,进行建图时失败。
具体细节和上下文:
- 雷达刚开始正常运行:


- 运行ros2 run micro_ros_agent micro_ros_agent serial -b 921600 --dev /dev/ttyUSB0 -v6后

单独进行键盘操控时也正常


所以我认为应该是供电不足问题,我该怎么解决。
- 雷达刚开始正常运行:
-
@2216200358
补充说明:
在运行建图过程中,雷达过几秒中会出现突然降速的情况,并出现以下错误。

-
@2216200358 拍下雷达板,en跳线冒有拔掉吗
-
@小鱼

没有拔 -
@2216200358 拔掉试试,另外雷达现在的供电怎么走的
-
@小鱼 拔掉也不行,还是那样。

-
@小鱼 四驱板和雷达运行成功啦,是因为端口号没换,应该是ttyUSB0和ttyUSB1。
运行ros2 launch slam_toolbox online_async_launch.py后,没弹出rviz,这好像不对吧,我重启试一下。

-
@2216200358 没弹窗正常的,slamtoolbox本身没界面
-
编译通过不了
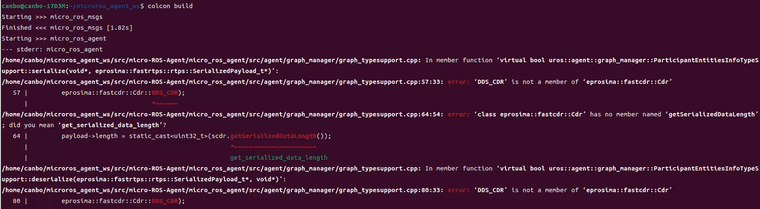
-
@1976933473 遇到同样的问题,不知道怎么解决
-
@1976933473 看看系统版本对不对
-
@1772009366
我重新安装了ubuntu22.04,再下载ros2-humble,可以正常运行agent了